இந்த திட்டத்தில், எப்படி செய்வது என்று விவாதிக்கிறோம் மோட்டார் வேகத்தை கட்டுப்படுத்தவும் Arduino PWM சுற்று பயன்படுத்தி, மற்றும் ஒரு டிசி மோட்டரில் தலைகீழ் முன்னோக்கி அல்லது திசைக் கட்டுப்பாட்டை எவ்வாறு செயல்படுத்துவது என்பது இரண்டு புஷ் பொத்தான் சுவிட்சுகள் மூலம் Arduino ஐப் பயன்படுத்துகிறது. இந்த அமைப்பைப் பயன்படுத்தி 30 ஆம்ப் வரை எந்த உயர் மின்னோட்டத்தையும் கட்டுப்படுத்தலாம்
வழங்கியவர்அங்கித் நேகி
எலக்ட்ரிக்கல் மற்றும் எலக்ட்ரானிக்ஸ் ஆகியவற்றில் மோட்டார் மிகவும் அவசியமான ஒரு அங்கமாகும், ஏனெனில் அவை பல பகுதிகளில் ஆக்சுவேட்டர்களாகப் பயன்படுத்தப்படுகின்றன.
ரோபாட்டிக்ஸ் போன்ற சிறிய பயன்பாடுகளுக்கும், கனமான மோட்டார்கள் பயன்படுத்தப்படும் பகுதிகளிலும் (தொழில்கள் போன்றவை) எங்களுக்கு மோட்டார்கள் தேவை.
இப்போது சிறிய பயன்பாடுகளுக்குப் பயன்படுத்தப்படும் மோட்டார்கள் அதிக மின்னோட்டத்தை எடுக்காததால் அவற்றை எளிதாகக் கட்டுப்படுத்தலாம் (2amp க்கும் குறைவாக).
மேலும் இந்த மோட்டார்கள் arduino போன்ற மைக்ரோகண்ட்ரோலரைப் பயன்படுத்துவதன் மூலம் எளிதாகக் கட்டுப்படுத்தலாம் மோட்டார் இயக்கி ஐகான்கள் L298 அல்லது L293D போன்றவை .
ஆனால் கனமான நோக்கங்களுக்காக (10amp க்கும் அதிகமானவை) பயன்படுத்தப்படும் மோட்டார்கள் கட்டுப்படுத்த முடியாது இந்த ஐஸ்களைப் பயன்படுத்துதல் அவை வரையறுக்கப்பட்ட மின்னோட்டத்தை (அதிகபட்சம் 2amp) வழங்க முடியும் என்பதால். இந்த மோட்டார்கள் எவ்வாறு கட்டுப்படுத்தப்படுகின்றன?
பதில் எளிது: ரிலேக்களைப் பயன்படுத்துகிறது , இது சுவிட்சுகளாக செயல்படுகிறது, அதாவது சிறிய மின்னோட்டத்தைப் பயன்படுத்தி பெரிய மின்னோட்டத்தை மாற்றவும். இந்த வழியில் இரண்டு விஷயங்களை அடைய முடியும்:
1. எங்கள் உயர் மின்னோட்டத்தை இயக்குவது.
2. சுற்று தனிமைப்படுத்துதல், இதனால் எந்த அதிர்ச்சியும் தடுக்கிறது.
இந்த ரிலேவை மாற்ற இப்போது எந்த மைக்ரோகண்ட்ரோலரையும் பயன்படுத்தலாம். நாங்கள் இங்கே arduino UNO ஐப் பயன்படுத்துவோம்.
இந்த திட்டத்திற்கு தேவையான கூறுகள்:
1. ARDUINO UNO: ரிலேவின் முதன்மை பக்கத்திற்கு உள்ளீட்டு தர்க்கங்களை வழங்க.
2. SPDT RELAY -2: இரு திசைகளிலும் சுழற்ற இரண்டு ரிலேக்கள் தேவை. உயர் தற்போதைய மோட்டார் விவரக்குறிப்புகளைக் கையாள தொடர்புகளை மதிப்பிட வேண்டும்

 3.பவர் மோஸ்ஃபெட்: நீங்கள் ஐஆர்எஃப் 1010 மோஸ்ஃபெட்டைப் பயன்படுத்தலாம்
3.பவர் மோஸ்ஃபெட்: நீங்கள் ஐஆர்எஃப் 1010 மோஸ்ஃபெட்டைப் பயன்படுத்தலாம் 
4. பேட்டரி (12 வி): மோட்டருக்கு மின்சாரம் வழங்க.
5. இரண்டு புஷ்பட்டன்கள்: arduino க்கு உள்ளீடுகளை வழங்க (அதாவது அழுத்தும் போது மற்றும் அழுத்தும் போது)

6. இரண்டு 10 கே ரெசிஸ்டர்கள்: பணிநீக்கம் செய்ய (கீழே விளக்கப்பட்டுள்ளது)

7. வயர்களை இணைத்தல்: இணைப்புகளை உருவாக்குவதற்கு.
திட்டவியல்:

படத்தில் காட்டப்பட்டுள்ளபடி இணைப்புகளை உருவாக்கவும்.
1. பொதுவாக ரிலே இரண்டின் திறந்த முனையத்தையும் பேட்டரியின் நேர்மறை முனையத்திற்கும் பொதுவாக மூடிய முனையத்தையும் பேட்டரியின் எதிர்மறை முனையத்துடன் இணைக்கவும்.
2. ஒவ்வொரு ரிலேவிலும் மீதமுள்ள முனையத்திற்கு இடையில் (மூன்றில்) மோட்டாரை இணைக்கவும்.
3. ரிலேக்களின் முதன்மை பக்கத்தின் ஒரு முனையத்தை குறியீட்டில் குறிப்பிடப்பட்டுள்ளபடி அர்டுயினோவின் வெளியீட்டு ஊசிகளுடன் இணைக்கவும், மற்ற முனையத்தை தரையில் இணைக்கவும்.
4. இரண்டு புஷ்பட்டன்களின் ஒரு முனையத்தையும் 5 வி முள் அர்டுயினோவிலும் மற்ற முனையத்தையும் குறியீட்டில் குறிப்பிடப்பட்டுள்ளபடி உள்ளீட்டு ஊசிகளுடன் இணைக்கவும்.
4. ** கீழே விவரிக்கப்பட்டுள்ளபடி, இந்த சுற்றுகளின் சரியான செயல்பாட்டிற்கு மின்தடையங்கள் மிக முக்கியமானவை என்பதால் அவற்றை இணைக்க மறக்காதீர்கள்:
ஏன் ரெசிஸ்டர்கள் இணைக்கப்படுகிறார்கள்?
Arduino இன் உள்ளீட்டு ஊசிகளுடன் எதுவும் இணைக்கப்படவில்லை என்பதை நீங்கள் காணலாம், ஆனால் இதன் பொருள் சுவிட்ச் திறந்திருக்கும் போது இந்த பின்அவுட்கள் தர்க்கரீதியான பூஜ்ஜியமாக இருக்கலாம் என்று அர்த்தமல்ல
மாறாக, சுவிட்ச் திறந்திருக்கும் போது arduino தர்க்கம் 0 மற்றும் தர்க்கம் 1 க்கு இடையில் எந்தவொரு சீரற்ற மதிப்பையும் எடுக்க முடியும் என்பதைக் குறிக்கிறது, இது நல்லதல்ல (இது பவுன்ஸ் என்று அழைக்கப்படுகிறது).
எனவே இங்கே நாம் விரும்புவது என்னவென்றால், உள்ளீட்டு முள் எதுவும் இணைக்கப்படாதபோது, அதாவது புஷ்பட்டன் திறந்திருக்கும் போது, arduino முள் இருந்து 0 உள்ளீட்டை எடுக்கும்.
இதை அடைய, மின்தடை வழியாக புஷ்பட்டனுக்கு முன் முள் நேரடியாக தரையில் இணைக்கப்பட்டுள்ளது. மின்தடையம் இல்லாமல் தரையில் நேரடியாக இணைக்கப்பட்டிருந்தால், முள் தரையில் குறுகி, அதிக அளவு மின்னோட்டம் பாயும் என்பதால் அது எரிந்து போகும் வாய்ப்புகள் உள்ளன. இதைத் தடுக்க, இடையில் ஒரு மின்தடை இணைக்கப்பட்டுள்ளது.
இந்த மின்தடையத்தை புல்டவுன் மின்தடையம் என்று அழைக்கப்படுகிறது, ஏனெனில் இது முள் மீது தர்க்கத்தை 0 க்கு இழுக்கிறது. மேலும் இந்த செயல்முறையை நீக்குதல் என்று அழைக்கப்படுகிறது.
குறியீடு:
இந்த குறியீட்டை உங்கள் arduino இல் எரிக்கவும்.
int x// initialise variables
int y
int z
int w
void setup() {
pinMode(6,OUTPUT)//initialise pin 6 as output to RL1
pinMode(9,OUTPUT)//initialise pin 9 as output to RL2
pinMode(3,INPUT)//initialise pin 3 as input
pinMode(4,INPUT)//initialise pin 4 as input
pinMode(10,OUTPUT)//initialise PWM pin 8 as output to gate of mosfet
pinMode(A0,INPUT)//initialise pin A0 as input from pot.
Serial.begin(9600)
}
void loop() {
z=analogRead(A0)// read values from potentiometer in terms of voltage
w= map(z,0,1023,0,255)// map those values from 0 to 255
analogWrite(10,w)// write the mapped value to 10thpin as output
delay(1)//on time period of mosfet
analogWrite(10,w)
delay(1)//off time period of ,mosfet
Serial.println(z)//print value from pot to serial monitor
Serial.println(w)//print mapped value to serial monitor
x= digitalRead(3)
y= digitalRead(4)
if(x==0 && y==0){digitalWrite(6,LOW)//hault motor
digitalWrite(9,LOW)}
if(x==1 && y==0){digitalWrite(6,HIGH)// clockwise rotation of motor
digitalWrite(9,LOW)}
if(x==0 && y==1){digitalWrite(6,LOW)// anticlockwise rotation of motor
digitalWrite(9,HIGH)}
if(x==1 && y==1){digitalWrite(6,LOW)//hault motor
digitalWrite(9,LOW)
}
}
வேலை (புரிந்துகொள்ளும் குறியீடு):
IR திசை கட்டுப்பாடு:
A. இரண்டு புஷ்பட்டன்களும் அழுத்தப்படாதபோது:
இந்த நிலையில், இரு ஊசிகளிலிருந்தும் 0 உள்ளீட்டை arduino எடுக்கும். இந்த நிலையில் குறியீட்டில் குறிப்பிடப்பட்டுள்ளபடி வெளியீட்டு ஊசிகளும் 0 தர்க்கத்தை (குறைந்த) தருகின்றன:
if (x == 0 && y == 0) {DigitalWrite (6, LOW)
டிஜிட்டல்ரைட் (9, குறைந்த)}
இரண்டு ரிலேக்களின் முதன்மைக்கான உள்ளீட்டு மின்னழுத்தம் இரண்டின் பூஜ்ஜிய இரண்டாம் நிலை முனையமாக இருப்பதால் பொதுவாக மூடிய நிலையில் உள்ளது. இதனால் மோட்டரின் இரு முனையங்களிலும் பூஜ்ஜிய வோல்ட் உள்ளது, இதனால் சுழற்சி ஏற்படாது.
பி. புஷ் பொத்தான் எக்ஸ் அழுத்தும் போது ஒய் அழுத்தப்படாது:
இந்த நிலையில், arduino பின் 4 இலிருந்து 0 உள்ளீடுகளை எடுத்துக்கொள்கிறது, ஆனால் pin3 இலிருந்து input 1 ஐ எடுக்கிறது. இந்த நிலையில் குறியீட்டில் குறிப்பிடப்பட்டுள்ளபடி முள் 6 தர்க்கம் 1 (HIGH) ஆக இருக்க வேண்டும், அதே சமயம் தர்க்கம் 0 (LOW) இல் பின் 9:
if (x == 1 && y == 0) {DigitalWrite (6, HIGH)
டிஜிட்டல்ரைட் (9, குறைந்த)}
ரிலே # 1 க்கு உள்ளீட்டு மின்னழுத்தம் அதிகமாக இருப்பதால், இந்த ரிலேவின் சுவிட்ச் பொதுவாக திறந்த நிலைக்கு எறியப்படும், அதே சமயம் ரிலே 2 க்கு உள்ளீட்டு மின்னழுத்தம் குறைவாக இருப்பதால், இந்த ரிலேவின் சுவிட்ச் பொதுவாக மூடிய நிலையில் உள்ளது, இதனால் மோட்டார் டெர்மினல்களில் முறையே 12v மற்றும் 0v ஏற்படுகிறது. ஒரு திசையில் மோட்டார் சுழற்சி.
C. புஷ் பொத்தான் Y ஐ அழுத்தும் போது எக்ஸ் அழுத்தும் போது:
இந்த நிலையில், arduino பின் 4 இலிருந்து 1 உள்ளீட்டை எடுக்கிறது, ஆனால் pin3 இலிருந்து input 0 ஐ எடுக்கிறது. இந்த நிலையில் உள்ள குறியீட்டில் குறிப்பிடப்பட்டுள்ளபடி முள் 6 தர்க்கம் 0 (குறைந்த) ஆக இருக்க வேண்டும், அதே சமயம் தர்க்கம் 1 (உயர்) இல் முள் 9:
if (x == 1 && y == 0) {DigitalWrite (6, LOW)
டிஜிட்டல்ரைட் (9, உயர்)}
இந்த நேரத்தில் ரிலே # 2 க்கான உள்ளீட்டு மின்னழுத்தம் அதிகமாக இருப்பதால், இந்த ரிலேவின் சுவிட்ச் பொதுவாக திறந்த நிலைக்கு வீசப்படுகிறது, அதே நேரத்தில் ரிலே # 1 க்கு உள்ளீட்டு மின்னழுத்தம் குறைவாக இருப்பதால், இந்த ரிலேவின் சுவிட்ச் பொதுவாக மூடிய நிலையில் உள்ளது, இதனால் முறையே 12v மற்றும் 0v ஆகியவை மோட்டார் முழுவதும் முனையங்கள், மற்றொரு திசையில் மோட்டார் சுழற்சியை ஏற்படுத்துகின்றன.
D. இரண்டு புஷ்பட்டன்களும் அழுத்தும் போது:
இந்த நிலையில், இரு ஊசிகளிலிருந்தும் 1 உள்ளீட்டை arduino எடுக்கும். இந்த நிலையில் குறியீட்டில் குறிப்பிடப்பட்டுள்ளபடி வெளியீட்டு ஊசிகளும் 0 தர்க்கத்தை (குறைந்த) தருகின்றன:
if (x == 0 && y == 0) {DigitalWrite (6, LOW)
டிஜிட்டல்ரைட் (9, குறைந்த)}
இரண்டு ரிலேக்களின் முதன்மைக்கான உள்ளீட்டு மின்னழுத்தம் இரண்டின் பூஜ்ஜிய இரண்டாம் நிலை முனையமாக இருப்பதால் பொதுவாக மூடிய நிலையில் உள்ளது. இதனால் மோட்டரின் இரு முனையங்களிலும் பூஜ்ஜிய வோல்ட் இருப்பதால் எந்த சுழலும் ஏற்படாது.
• வேக கட்டுப்பாடு:
அர்டுயினோவின் A0 முள் உள்ளீடாக 0 வோல்ட் கொடுக்கும் போது பொட்டென்டோமீட்டர் அத்தகைய நிலையில் உள்ளது என்று சொல்லலாம். இதன் காரணமாக, arduino இந்த மதிப்பை 0 என வரைபடமாக்குகிறது, இதனால் 0 # PWM ஐ முள் # 10 இல் கொடுக்கிறது, அதாவது,
அனலாக்ரைட் (10,0) // வரைபட மதிப்பை 10 வது முள் என வெளியீடாக எழுதுங்கள்
எனவே மோஸ்ஃபெட்டின் கேட் 0 மின்னோட்டத்தைப் பெறுகிறது, இதன் காரணமாக அது அணைக்கப்பட்டு, மோட்டார் சுவிட்ச் ஆஃப் நிலையில் உள்ளது.
இருப்பினும், பானை சுழற்றப்பட்டு, பானையின் மதிப்பு மாறுபடும் என்பதால், முள் A0 இல் மின்னழுத்தமும் மாறுபடும், மேலும் இந்த மதிப்பு பின் # 10 இல் விகிதாசாரமாக அதிகரிக்கும் PWM அகலத்துடன் பொருத்தப்படுகிறது, இதனால் மோட்டார் மற்றும் மோஸ்ஃபெட் வழியாக அதிக மின்னோட்டம் பாய்கிறது வடிகால், இது மோட்டார் அதிக வேகத்தை விகிதாச்சாரத்தில் பெற அனுமதிக்கிறது, மேலும் இது நேர்மாறாகவும் நிகழ்கிறது.
ஆகவே, குறிப்பிட்ட பானையை சரிசெய்வதன் மூலமும், ஓரிரு புஷ் பொத்தான்கள் மூலமாகவும் உயர் மின்னோட்ட டி.சி மோட்டரின் வேகத்தையும் திசையையும் (தலைகீழ் முன்னோக்கி) கட்டுப்படுத்த ஒரு ஆர்டுயினோ எவ்வாறு பயன்படுத்தப்படலாம் என்பதை மேலே விவாதத்திலிருந்து நாம் காணலாம்.
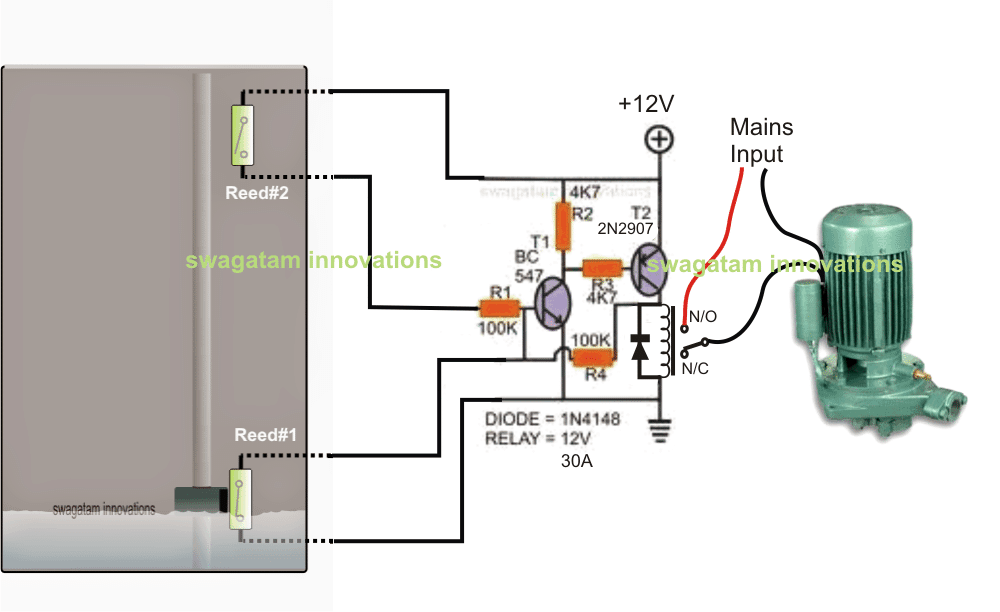
புதுப்பிப்பு : உயர் மின்னோட்ட மோட்டருக்கு, பின்வரும் மாற்றியமைக்கப்பட்ட வரைபடத்தில் சுட்டிக்காட்டப்பட்டுள்ளபடி இந்த உயர் சக்தி ரிலேக்களை இயக்க 12V / 30 ஆம்ப் ரிலேக்கள் மற்றும் பிஜேடி இயக்கி நிலைகளைப் பயன்படுத்தவும்:

முந்தைய: அலாரத்துடன் கார் தலைகீழ் பார்க்கிங் சென்சார் சுற்று அடுத்து: Arduino PWM சிக்னல் ஜெனரேட்டர் சுற்று