இந்த இடுகையில், விருப்பமான இயக்கங்களுடன் ஒரு இன்குபேட்டர் மோட்டார் பொறிமுறையை இயக்குவதற்கான தலைகீழ் முன்னோக்கி டைமர் சுற்று கற்றுக்கொள்கிறோம். இந்த யோசனையை திரு அன்வர் கோரினார்
தொழில்நுட்ப குறிப்புகள்
நான் இந்தோனேசியாவைச் சேர்ந்தவன் ..... எனக்கு உயர் முறுக்கு மோட்டார் (காரில் டிசி மோட்டார் பவர் விண்டோ) கொண்ட இன்குபேட்டர் டைமருக்கு திட்டங்கள் தேவை. ஒரு டி.சி மோட்டரை இரண்டு திசையில் இயக்க முயற்சிக்கிறேன், அது இறுதி நிலையை அடையும் வரை நிறுத்தி துருவமுனைப்பை மாற்றுகிறது, எனவே சக்தி மீண்டும் பயன்படுத்தப்படும்போது அது மற்ற திசையை இயக்கும். பின்னர் மறுமுனையில் அதையே செய்யுங்கள்.
1. டைமர் 1 நிமிடத்திற்கு சக்தியை இயக்குகிறது. (காலை 7:00 -7: காலை 01 மணி)
2. மோட்டார் நிறுத்த திசையைத் தாக்கும் வரை ஒரு திசையில் இயங்கும், 30 செக் என்று சொல்லுங்கள்.
3. மோட்டருக்கு மின்சாரம் நிறுத்த நிலை மற்றும் 1 நிமிடத்திற்கு தாமதமாகும்போது அணைக்கப்படும். முக்கிய சக்தியை முடிவுக்கு / அணைக்க டைமர். மேலும் துருவமுனைப்பை மாற்றுகிறது.
4. அடுத்த முறை பிரதான டைமர் வரும்போது (10: 00-10: 01) இது தலைகீழ் திசையில் அளவைக் கொண்டு தொடர்ந்து மீண்டும் மீண்டும் செய்கிறது
5. 12 வி.டி.சி மோட்டார் தலைகீழ் (மோட்டார் + மற்றும் - இலிருந்து இரண்டு கேபிள்)
6. Rev / Fwd மோட்டருக்கு லெட் காட்டி தேவை
ஐயா எனக்கு உதவ முடியுமா?
எந்த உதவிக்கும் முன்கூட்டியே நன்றி.
இது ஒரு முக்கியமான வீட்டுத் திட்டமாகும், இது 100% நம்பகமானதாக இருக்க வேண்டும்.
வடிவமைப்பு

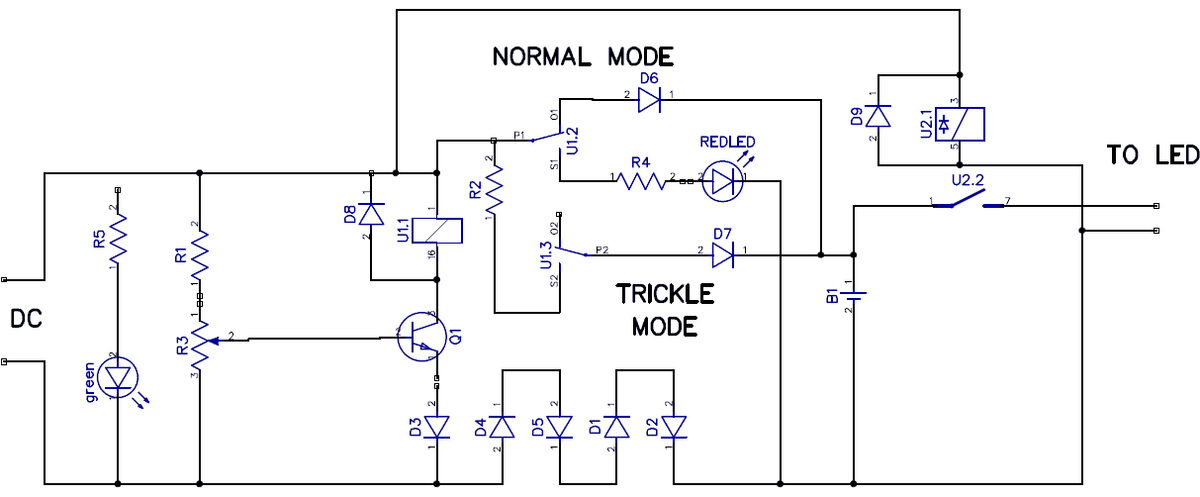
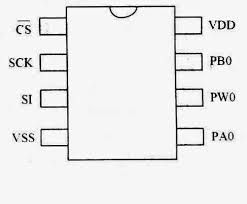
மேலே உள்ள படத்தில், முன்னரே தீர்மானிக்கப்பட்ட நேர இடைவெளியின் பின்னர் ஒரு இன்குபேட்டர் மோட்டரின் முன்மொழியப்பட்ட தலைகீழ் முன்னோக்கி இயக்கத்தை செயல்படுத்துவதற்கான வடிவமைப்பை நாம் காட்சிப்படுத்தலாம்.
மின்சாரம் இயக்கப்படும் தருணத்தில் நமக்கு பின்வரும் காட்சி உள்ளது:
'செட்' க்கான காந்த சுவிட்ச் செயலிழந்த நிலையில் இருப்பதாக கருதப்படலாம் அல்லது மோட்டார் அல்லது வடிவமைக்கப்பட்ட இன்குபேட்டர் பொறிமுறையானது அதன் பூஜ்ஜிய தொடக்க நிலையில் இருக்கும்போது மனச்சோர்வடைகிறது.
காந்த ரீட் சுவிட்சுகளைப் பயன்படுத்தி 'செட்' / 'மீட்டமை' சுவிட்சுகள் செயல்படுத்தப்பட வேண்டும் என்பதை நினைவில் கொள்க.
சக்தி இயக்கப்பட்டவுடன், ஐசி 4060 சி 2 வழியாக மீட்டமைக்கப்படுகிறது, இதனால் அது பூஜ்ஜியத்திலிருந்து எண்ணும் செயல்முறையைத் தொடங்குகிறது, மேலும் பின் 3 பூஜ்ஜிய தர்க்கமாக வழங்கப்படுகிறது.
இந்த ஆரம்ப பூஜ்ஜிய தர்க்கம் C3 வழியாக T1 இன் அடித்தளத்திற்கு வழங்கப்படுகிறது, இது T3 மற்றும் அதனுடன் தொடர்புடைய ரிலேவை செயல்படுத்த கட்டாயப்படுத்துகிறது. செயல்பாட்டில் உள்ள R7 இந்த பயன்முறையில் T1 / T3 இணைக்கப்படுவதை உறுதி செய்கிறது.
இந்த கட்டத்தில் டிபிடிடி ரிலே அதன் N / O தொடர்புகளில் மோட்டார் மற்றும் பொறிமுறையை ஒரு 'முன்னோக்கி' இயக்கத்தை நோக்கி இயக்குகிறது.
மோட்டார் நகரத் தொடங்கியவுடன், 'செட்' பொத்தான் T4 மற்றும் மேல் SPDT செயல்பட ஒரு வாய்ப்பைப் பெறுகிறது, இதில் SPDT ரிலே ஒரு N / O நிலை மாற்றத்தை அடைகிறது, இது DPDT இன் N / C தொடர்புகளை காத்திருப்புடன் வழங்குகிறது விநியோகி..
மோட்டார் மற்றும் / அல்லது பொறிமுறையானது 'மீட்டமை' நிலையை அடையும் வரை நகரும், இது T2 T1 / T4 தாழ்ப்பாளை செயல்படுத்துவதற்கும் உடைப்பதற்கும் காரணமாகிறது.
T4 சுவிட்ச் ஆஃப் மூலம், டிபிடிடி ரிலே அதன் நிலையை N / O இலிருந்து N / C ஆக மாற்றுகிறது மற்றும் மோட்டார் பொறிமுறைக்கு எதிர் (தலைகீழ்) இயக்கத்தை வழங்குகிறது.
இன்குபேட்டர் மோட்டார் பொறிமுறையானது இப்போது அதன் திசையை புரட்டி, 'செட்' புள்ளியை அடையும் வரை தலைகீழ் இயக்கத்தைத் தொடங்குகிறது, இது T4 இன் அடிப்படை இயக்ககத்தை விரைவாக அணைக்கிறது, SPDT டிபிடிடியின் வெட்டு சக்தியை முடக்குகிறது மற்றும் முழு பொறிமுறையும் ஒரு நிலைக்கு வரும் .
இதற்கிடையில், ஐசி 4060 அதன் பின் 3 இல் (சி 3 ஐ வெளியேற்றுவதன் மூலம்) ஒரு உயர் தர்க்கத்தின் வழியாகச் சென்றபின் மீண்டும் பூஜ்ஜிய தர்க்கத்தை உருவாக்கும் வரை எண்ணுவதைத் தொடர்கிறது.
சுழற்சி மீண்டும் தொடங்கப்பட்டு மேலே விளக்கப்பட்டுள்ளபடி நடைமுறையை மீண்டும் செய்கிறது.
முந்தைய: அர்டுயினோவுடன் எல்.ஈ.டி ஒளிரும் - முழுமையான பயிற்சி அடுத்து: உயர் சக்தி தொழில்துறை மெயின்ஸ் சர்ஜ் அடக்கி ஆராயப்பட்டது