ஒரு ஆர்டுயினோ மூன்று கட்ட இன்வெர்ட்டர் என்பது ஒரு சுற்று ஆகும், இது ஒரு திட்டமிடப்பட்ட ஆர்டுயினோ அடிப்படையிலான ஆஸிலேட்டர் மூலம் 3 கட்ட ஏசி வெளியீட்டை உருவாக்குகிறது.
கொடுக்கப்பட்ட 3 கட்ட சுமைகளை இயக்குவதற்கான பயனர் விருப்பத்தின்படி மேம்படுத்தக்கூடிய எளிய நுண்செயலி அர்டுயினோ அடிப்படையிலான 3 கட்ட இன்வெர்ட்டர் சுற்று எவ்வாறு உருவாக்குவது என்பதை இந்த இடுகையில் கற்றுக்கொள்கிறோம்.

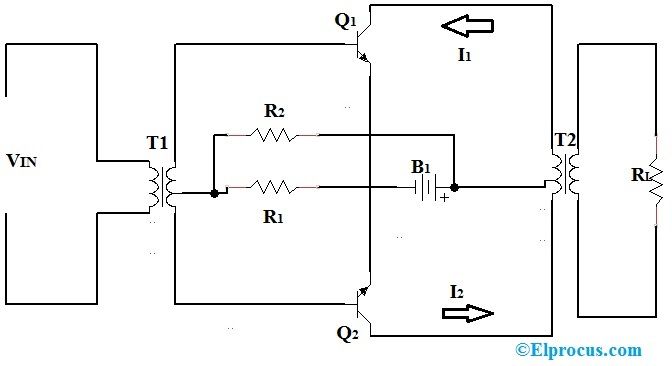
பயனுள்ள மற்றும் எளிமையான ஒன்றை நாங்கள் ஏற்கனவே படித்தோம் 3 கட்ட இன்வெர்ட்டர் சுற்று எங்கள் முந்தைய இடுகைகளில் ஒன்றில், 3 கட்ட சதுர அலை சமிக்ஞைகளை உருவாக்குவதற்கான ஓப்பம்ப்களை நம்பியிருந்தது, அதே நேரத்தில் மொஸ்பெட்டுகளை ஓட்டுவதற்கான 3 கட்ட புஷ் புல் சிக்னல்கள் சிறப்பு 3 கட்ட இயக்கி ஐ.சி.க்களைப் பயன்படுத்தி செயல்படுத்தப்பட்டன.
தற்போதைய கருத்தில், இந்த சிறப்பு இயக்கி ஐ.சி.க்களைப் பயன்படுத்தி முக்கிய சக்தி கட்டத்தை உள்ளமைக்கிறோம், ஆனால் 3 கட்ட சமிக்ஞை ஜெனரேட்டர் ஒரு ஆர்டுயினோவைப் பயன்படுத்தி உருவாக்கப்படுகிறது.
ஏனென்றால், Arduino அடிப்படையிலான 3 கட்ட இயக்கி உருவாக்குவது மிகவும் சிக்கலானது மற்றும் பரிந்துரைக்கப்படவில்லை. மேலும், இந்த நோக்கத்திற்காக மிகவும் மலிவான விலையில் ஆஃப்-தி-ஷெல்ஃப் திறமையான டிஜிட்டல் ஐ.சி.க்களைப் பெறுவது மிகவும் எளிதானது.
முழுமையான இன்வெர்ட்டர் சுற்றுவட்டத்தை உருவாக்குவதற்கு முன், முதலில் ஒரு ஆர்டுயினோ யுஎன்ஓ போர்டுக்குள் பின்வரும் ஆர்டுயினோ குறியீட்டை நிரல் செய்ய வேண்டும், பின்னர் மீதமுள்ள விவரங்களுடன் தொடரவும்.
Arduino 3 கட்ட சிக்னல் ஜெனரேட்டர் குறியீடு
void setup() {
// initialize digital pin 13,12&8 as an output.
pinMode(13, OUTPUT)
pinMode(12,OUTPUT)
pinMode(8,OUTPUT)
}
void loop() {
int var=0
digitalWrite(13, HIGH)
digitalWrite(8,LOW)
digitalWrite(12,LOW)
delay(6.67)
digitalWrite(12,HIGH)
while(var==0){
delay(3.33)
digitalWrite(13,LOW)
delay(3.33)
digitalWrite(8,HIGH)
delay(3.34)
digitalWrite(12,LOW)
delay(3.33)
digitalWrite(13,HIGH)
delay(3.33)
digitalWrite(8,LOW)
delay(3.34)
digitalWrite(12,HIGH)
}
}
அசல் மூல : http://forum.arduino.cc/index.php?topic=423907.0
மேலே உள்ள குறியீட்டைப் பயன்படுத்தி கருதப்படும் அலைவடிவத்தை பின்வரும் வரைபடத்தில் காட்சிப்படுத்தலாம்:

உங்கள் Arduino இல் மேலே உள்ள குறியீட்டை நீங்கள் எரித்து உறுதிசெய்தவுடன், முன்னேறி, மீதமுள்ள சுற்று நிலைகளை உள்ளமைக்க வேண்டிய நேரம் இது.
இதற்காக உங்களுக்கு பின்வரும் பகுதிகள் தேவைப்படும், அவை நீங்கள் ஏற்கனவே வாங்கியிருக்கலாம்:
பாகங்கள் தேவை
IC IR2112 - 3 எண் (அல்லது ஏதேனும் ஒத்த 3 கட்ட இயக்கி ஐசி)
BC547 டிரான்சிஸ்டர்கள் - 3 எண்
மின்தேக்கி 10uF / 25V மற்றும் 1uF / 25V = 3 ஒவ்வொன்றும்
100uF / 25V = 1no
1N4148 = 3nos (1N4007 க்கு மேல் 1N4148 பரிந்துரைக்கப்படுகிறது)
மின்தடையங்கள், அனைத்தும் 1/4 வாட் 5%
100 ஓம்ஸ் = 6 நோஸ்
1 கே = 6 எண்
கட்டுமான விவரங்கள்
தொடங்குவதற்கு, கீழே கொடுக்கப்பட்டுள்ளபடி, 3 ஐ.சி.களில் சேரும் நோக்கம் கொண்ட 3 கட்ட மோஸ்ஃபெட் டிரைவர் கட்டத்தை உருவாக்குகிறோம்:

இயக்கி வாரியம் கூடியவுடன், BC547 டிரான்சிஸ்டர்கள் ஐ.சியின் HIN மற்றும் LIN உள்ளீடுகளுடன் இணைகின்றன, மேலும் அவை பின்வரும் படத்தில் விளக்கப்பட்டுள்ளன:

மேலே உள்ள வடிவமைப்புகள் கட்டமைக்கப்பட்டவுடன், கணினியை மாற்றுவதன் மூலம் நோக்கம் கொண்ட முடிவை விரைவாக சரிபார்க்க முடியும்.
நினைவில் கொள்ளுங்கள், Arduino ஐ துவக்க சிறிது நேரம் தேவைப்படுகிறது, எனவே முதலில் Arduino ஐ இயக்கவும் பின்னர் சில நொடிகளுக்குப் பிறகு + 12V விநியோகத்தை இயக்கி சுற்றுக்கு மாற்றவும் பரிந்துரைக்கப்படுகிறது.
பூட்ஸ்டார்ப் மின்தேக்கிகளை எவ்வாறு கணக்கிடுவது
மேலே உள்ள புள்ளிவிவரங்களில் நாம் காணக்கூடியது போல, ஒரு சுற்றுக்கு டையோட்கள் மற்றும் மின்தேக்கிகள் வடிவில் மொஸ்ஃபெட்டுகளுக்கு அருகிலுள்ள இரண்டு வெளிப்புற கூறுகள் தேவைப்படுகின்றன. இந்த பகுதிகள் உயர் பக்க மொஸ்ஃபெட்டுகளை துல்லியமாக மாற்றுவதில் முக்கிய பங்கு வகிக்கின்றன, மேலும் நிலைகள் பூட்ஸ்ட்ராப்பிங் நெட்வொர்க் என்று அழைக்கப்படுகின்றன.
ஏற்கனவே வரைபடத்தில் கொடுக்கப்பட்டிருந்தாலும் , இந்த மின்தேக்கிகளின் மதிப்புகள் பின்வரும் சூத்திரத்தைப் பயன்படுத்தி குறிப்பாக கணக்கிடப்படலாம்:


பூட்ஸ்டார்ப் டையோட்களை எவ்வாறு கணக்கிடுவது
பூட்ஸ்ட்ராப் நெட்வொர்க்கிற்கான மின்தேக்கி மதிப்பைக் கணக்கிடுவதற்கு மேலே உள்ள சமன்பாடுகள் பயன்படுத்தப்படலாம், அதனுடன் தொடர்புடைய டையோடு பின்வரும் நிபந்தனைகளை நாம் கருத்தில் கொள்ள வேண்டும்:
உயர் பக்க மோஸ்ஃபெட்டுகள் இயக்கப்படும் போது டையோட்கள் செயல்படுத்தப்படுகின்றன அல்லது முன்னோக்கி சார்பு பயன்முறையில் செயல்படுத்தப்படுகின்றன மற்றும் அவற்றைச் சுற்றியுள்ள சாத்தியங்கள் முழு பாலம் மோஸ்ஃபெட் மின்னழுத்தக் கோடுகளில் BUS மின்னழுத்தத்திற்கு கிட்டத்தட்ட சமமாக இருக்கும், எனவே பூட்ஸ்ட்ராப் டையோடு போதுமானதாக மதிப்பிடப்பட வேண்டும் குறிப்பிட்ட வரைபடங்களில் குறிப்பிடப்பட்டுள்ளபடி முழு பயன்பாட்டு மின்னழுத்தத்தைத் தடுக்க.
இது புரிந்துகொள்வது மிகவும் எளிதானது, இருப்பினும் தற்போதைய மதிப்பீட்டைக் கணக்கிடுவதற்கு, மாறுதல் அதிர்வெண்ணுடன் கேட் சார்ஜ் அளவை பெருக்கி சில கணிதங்களைச் செய்ய வேண்டியிருக்கும்.
எடுத்துக்காட்டாக, 100 கி.ஹெர்ட்ஸ் மாறுதல் அதிர்வெண்ணுடன் மோஸ்ஃபெட் ஐஆர்எஃப் 450 பயன்படுத்தப்பட்டால், டையோடின் தற்போதைய மதிப்பீடு 12 எம்ஏ இருக்கும். இந்த மதிப்பு மிகவும் குறைவாக இருப்பதால், பெரும்பாலான டையோட்கள் இதைவிட அதிக தற்போதைய மதிப்பீட்டைக் கொண்டிருக்கும் என்பதால், குறிப்பிட்ட கவனம் அவசியமில்லை.
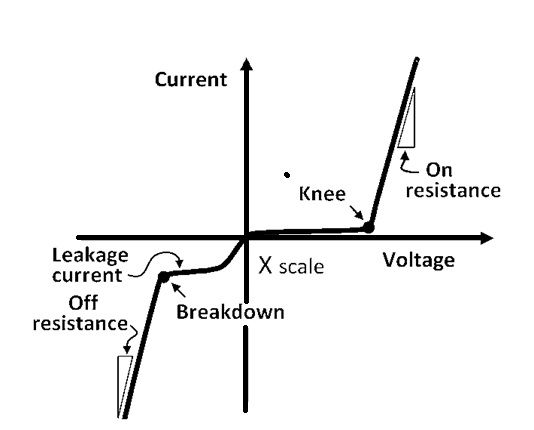
டையோடின் அதிக வெப்பநிலை கசிவு சிறப்பியல்பு கருத்தில் கொள்ளப்பட வேண்டியது முக்கியமானது, குறிப்பாக பூட்ஸ்ட்ராப் மின்தேக்கி அதன் கட்டணத்தை நியாயமான நீடித்த நேரத்திற்கு சேமித்து வைக்க வேண்டிய சூழ்நிலைகளில். இத்தகைய சூழ்நிலையில், டையோடு பூட்ஸ்ட்ராப் மின்தேக்கியிலிருந்து ஐ.சி.யின் சப்ளை தண்டவாளங்களை நோக்கித் தள்ளப்படுவதிலிருந்து கட்டணத்தின் அளவைக் குறைக்க அதிவேக மீட்பு வகையாக இருக்க வேண்டும்.
சில பாதுகாப்பு உதவிக்குறிப்புகள்
3 கட்ட இன்வெர்ட்டர் சுற்றுகளில் உள்ள மொஸ்ஃபெட்டுகள் இத்தகைய கருத்துக்களுடன் தொடர்புடைய பல ஆபத்தான அளவுருக்கள் காரணமாக சேதத்திற்கு மிகவும் பாதிக்கப்படக்கூடும் என்பதை நாம் அனைவரும் அறிவோம், குறிப்பாக தூண்டல் சுமைகள் பயன்படுத்தப்படும்போது. இதை நான் ஏற்கனவே எனது ஒன்றில் விரிவாக விவாதித்தேன் முந்தைய கட்டுரைகள் , மேலும் இந்த கட்டுரையை குறிப்பிடுவதற்கும் கொடுக்கப்பட்ட வழிகாட்டுதல்களின்படி மொஸ்ஃபெட்களை செயல்படுத்துவதற்கும் கண்டிப்பாக அறிவுறுத்தப்படுகிறது.
பயன்படுத்துகிறது ஐசி ஐஆர்எஸ் 2330
பின்வரும் வரைபடங்கள் ஒரு ஆர்டுயினோவிலிருந்து 3 கட்ட PWM கட்டுப்படுத்தப்பட்ட இன்வெர்ட்டராக வேலை செய்ய வடிவமைக்கப்பட்டுள்ளன.
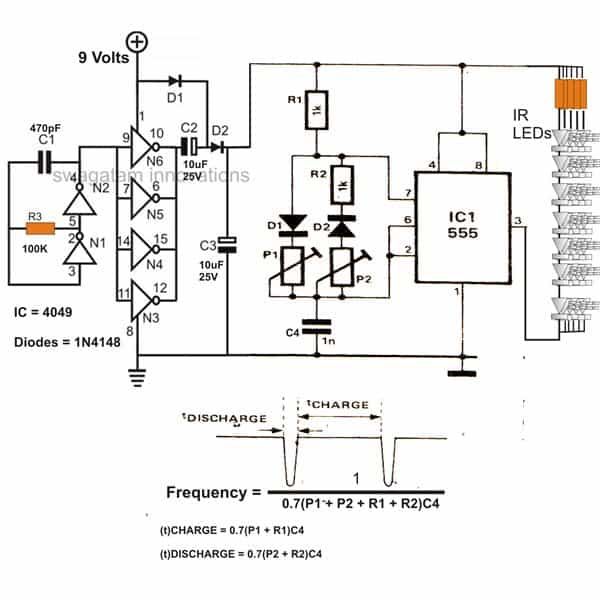
முதல் வரைபடம் ஐசி 4049 இலிருந்து ஆறு NOT வாயில்களைப் பயன்படுத்தி கம்பி செய்யப்படுகிறது. இந்த நிலை Arduino PWM பருப்புகளை நிரப்பு உயர் / குறைந்த தர்க்க ஜோடிகளாகப் பிரிக்கப் பயன்படுகிறது, இதனால் பாலம் 3 கட்ட இன்வெர்ட்டர் இயக்கி ஐ.சி. ஐசி ஐஆர்எஸ் 2330 ஊட்டி PWM களுடன் இணக்கமாக மாற்றப்படலாம்.


மேலே இருந்து இரண்டாவது வரைபடம் முன்மொழியப்பட்ட Arduino PWM, 3 கட்ட இன்வெர்ட்டர் வடிவமைப்பிற்கான பாலம் இயக்கி கட்டத்தை உருவாக்குகிறது ஐசி ஐஆர்எஸ் 2330 பிரிட்ஜ் டிரைவர் சிப்.
HIN மற்றும் LIN என சுட்டிக்காட்டப்பட்ட ஐசியின் உள்ளீடுகள் NOT வாயில்களிலிருந்து பரிமாணப்படுத்தப்பட்ட Arduino PWM களை ஏற்றுக்கொள்கின்றன மற்றும் 6 IGBT களால் உருவாக்கப்பட்ட வெளியீட்டு பாலம் நெட்வொர்க்கை இயக்குகின்றன, இதனால் அவை மூன்று வெளியீடுகளில் இணைக்கப்பட்ட சுமைகளை இயக்குகின்றன.
1 இன் முன்னமைவு இன்வெர்ட்டரின் தற்போதைய வரம்பை கட்டுப்படுத்த I இன் மூடிய முள் முழுவதும் பொருத்தமாக கட்டுப்படுத்த பயன்படுகிறது, இன்வெர்ட்டருக்கு தற்போதைய ஒப்பீட்டளவில் அதிக மின்னோட்டம் குறிப்பிடப்பட்டால் 1 ஓம் சென்சிங் மின்தடை சரியான முறையில் குறைக்கப்படலாம்.
மடக்குதல்:
Arduino அடிப்படையிலான 3 கட்ட இன்வெர்ட்டர் சுற்று எவ்வாறு உருவாக்குவது என்பது குறித்த எங்கள் விவாதத்தை இது முடிக்கிறது. இந்த விஷயத்தில் உங்களுக்கு மேலும் ஏதேனும் சந்தேகங்கள் அல்லது கேள்விகள் இருந்தால் தயவுசெய்து கருத்து தெரிவிக்கவும், பதில்களை விரைவாகப் பெறவும்.
பிசிபி கெர்பர் கோப்புகள் மற்றும் பிற தொடர்புடைய கோப்புகளுக்கு நீங்கள் பின்வரும் இணைப்பைக் குறிப்பிடலாம்:
https://drive.google.com/file/d/1oAVsjNTPz6bOFaPOwu3OZPBIfDx1S3e6/view?usp=sharing
மேற்கண்ட விவரங்கள் பங்களித்தன ' சைப்ராக்ஸ் '
முந்தைய: உரத்த பிஸ்டல் ஒலி சிமுலேட்டர் சுற்று அடுத்து: டிரான்சிஸ்டர் காமன் கலெக்டர்