ஒரு பிக் அண்ட் பிளேஸ் ரோபோ என்பது ஒரு பொருளை எடுத்து விரும்பிய இடத்தில் வைக்க பயன்படுகிறது. இது கிடைமட்ட, செங்குத்து மற்றும் சுழற்சி அச்சுகளில் இயக்கத்தை வழங்கும் ஒரு உருளை ரோபோவாக இருக்கலாம், இரண்டு சுழற்சி மற்றும் ஒரு நேரியல் இயக்கத்தை வழங்கும் ஒரு கோள ரோபோ, ஒரு வெளிப்படையான ரோபோ அல்லது ஸ்காரா ரோபோ (3 செங்குத்து அச்சுகள் சுழலும் ஆயுதங்களைக் கொண்ட நிலையான ரோபோக்கள்).
நன்மைகள்
மேலும் நகர்த்துவதற்கு முன், ரோபோக்களைத் தேர்ந்தெடுப்பதற்கும் வைப்பதற்கும் சில காரணங்களைக் காண்போம்:
- அவை வேகமானவை, அவற்றின் மனித சகாக்களுடன் ஒப்பிடும்போது நொடிகளில் வேலைகளைச் செய்ய முடியும்.
- அவை நெகிழ்வானவை மற்றும் பொருத்தமான வடிவமைப்பைக் கொண்டுள்ளன.
- அவை துல்லியமானவை.
- அவை வேலை செய்யும் சூழலின் பாதுகாப்பை அதிகரிக்கின்றன, உண்மையில் ஒருபோதும் சோர்வடையாது.
ஒரு பிக் என் பிளேஸ் ரோபோவின் பாகங்கள்

என் இடம் ரோபோவைத் தேர்ந்தெடுங்கள்
தேர்வு மற்றும் இடம் ரோபோ உண்மையில் எதைக் கொண்டுள்ளது என்பதைப் பார்ப்போம்:
- ரோவருக்கு : இது ஒரு சிலிண்டர் அல்லது ஒரு கோளம், மூட்டுகள் மற்றும் இணைப்புகள் போன்ற பல கடினமான உடல்களைக் கொண்ட ரோபோவின் முக்கிய உடலாகும். இது ஒரு கையாளுபவர் என்றும் அழைக்கப்படுகிறது.
- முடிவு செயல்திறன் : இது ரோவரின் கடைசி மூட்டுடன் இணைக்கப்பட்ட உடலாகும், இது பொருட்களைப் பிடிக்க அல்லது கையாளும் நோக்கத்திற்காகப் பயன்படுத்தப்படுகிறது. இது ஒரு மனிதனின் கைக்கு ஒப்பானதாக இருக்கலாம்.
- ஆக்சுவேட்டர்கள் : அவர்கள் ரோபோவின் இயக்கிகள். இது உண்மையில் ரோபோவை செயல்படுத்துகிறது. இது சர்வோ மோட்டார், ஸ்டெப்பர் மோட்டார் அல்லது நியூமேடிக் அல்லது ஹைட்ராலிக் சிலிண்டர்கள் போன்ற எந்த மோட்டராகவும் இருக்கலாம்.
- சென்சார்கள்: ரோபோ ஒட்டுமொத்தமாக சீராக செயல்படுவதை உறுதிசெய்ய அவை உள் மற்றும் வெளிப்புற நிலையை உணர பயன்படுத்தப்படுகின்றன. சென்சார்களில் டச் சென்சார்கள், ஐஆர் சென்சார் போன்றவை அடங்கும்.
- கட்டுப்படுத்தி : இது சென்சார் பின்னூட்டத்தின் அடிப்படையில் ஆக்சுவேட்டர்களைக் கட்டுப்படுத்தப் பயன்படுகிறது, இதனால் ஒவ்வொரு மூட்டுகளின் இயக்கத்தையும், இறுதியில் செயல்திறனின் இயக்கத்தையும் கட்டுப்படுத்துகிறது.
ஒரு அடிப்படை தேர்வு என் இடம் ரோபோவின் வேலை:
ஒரு அடிப்படை செயல்பாடு ரோபோவைத் தேர்ந்தெடுத்து வைக்கவும் அதன் மூட்டுகளால் செய்யப்படுகிறது. மூட்டுகள் மனித மூட்டுகளுக்கு ஒப்பானவை மற்றும் ரோபோவில் தொடர்ச்சியான இரண்டு கடினமான உடல்களில் சேர பயன்படுத்தப்படுகின்றன. அவை ரோட்டரி கூட்டு அல்லது நேரியல் கூட்டு இருக்க முடியும். ஒரு ரோபோவின் எந்தவொரு இணைப்பிற்கும் ஒரு கூட்டு சேர்க்க, அந்த உடல் பகுதிக்கான சுதந்திரத்தின் அளவு மற்றும் இயக்கத்தின் அளவுகள் பற்றி நாம் தெரிந்து கொள்ள வேண்டும். சுதந்திரத்தின் டிகிரி உடலின் நேரியல் மற்றும் சுழற்சி இயக்கத்தை செயல்படுத்துகிறது மற்றும் இயக்கத்தின் டிகிரி உடல் நகரக்கூடிய அச்சின் எண்ணிக்கையைக் குறிக்கிறது.

ஒரு எளிய தேர்வு என் இடம் ரோபோ
ஒரு எளிய தேர்வு மற்றும் இடம் ரோபோ ஒரு நகரும் அடித்தளத்தில் இரண்டு கடினமான உடல்களைக் கொண்டுள்ளது, இது ரோட்டரி கூட்டுடன் இணைக்கப்பட்டுள்ளது. ரோட்டரி கூட்டு என்பது அச்சுகளில் ஏதேனும் ஒன்றைச் சுற்றி 360 டிகிரியில் சுழற்சியை வழங்கும் ஒன்றாகும்.
- நேரியல் இயக்கத்தை வழங்கும் சக்கரங்களுடன் கீழே அல்லது அடிப்பகுதி இணைக்கப்பட்டுள்ளது.
- தி 1ஸ்டம்ப்உறுதியான உடல் சரி செய்யப்பட்டது மற்றும் இறுதி செயல்திறன் வழங்கப்படும் இரண்டாவது உறுதியான உடலை ஆதரிக்கிறது.
- த 2ndஉறுதியான உடல் அனைத்து 3 அச்சுகளிலும் இயக்கத்துடன் வழங்கப்படுகிறது மற்றும் 3 டிகிரி சுதந்திரம் உள்ளது. இது 1 உடன் இணைக்கப்பட்டுள்ளதுஸ்டம்ப்ஒரு சுழற்சி கூட்டு கொண்ட உடல்.
- இறுதி செயல்திறன் அனைத்து 6 டிகிரி சுதந்திரத்திற்கும் இடமளிக்க வேண்டும், கூறுகளின் அனைத்து பக்கங்களையும் அடைய, எந்த உயரத்திற்கும் நிலையை எடுக்க வேண்டும்.
மொத்தத்தில், அடிப்படை தேர்வு மற்றும் இடம் ரோபோ பின்வருமாறு செயல்படுகிறது:
- ரோபோவை விரும்பிய இடத்திற்கு நகர்த்த அடித்தளத்தின் அடியில் உள்ள சக்கரங்கள் உதவுகின்றன.
- இறுதி செயல்திறனை ஆதரிக்கும் உறுதியான உடல் பொருள் வைக்கப்படும் நிலையை அடைய வளைகிறது அல்லது நேராக்குகிறது.
- இறுதி செயல்திறன் பொருளை ஒரு வலுவான பிடியுடன் எடுத்து விரும்பிய நிலையில் வைக்கிறது.
பிக் அண்ட் பிளேஸ் ரோபோவைப் பற்றிய சுருக்கமான யோசனை இப்போது கிடைத்துள்ளதால், அது உண்மையில் எவ்வாறு கட்டுப்படுத்தப்படுகிறது என்பதே அடிப்படை கேள்வி.
ஒரு எளிய தேர்வு மற்றும் இடம் ரோபோவை அதன் இறுதி செயல்திறனின் இயக்கத்தைக் கட்டுப்படுத்துவதன் மூலம் கட்டுப்படுத்தலாம். இயக்கம் ஹைட்ராலிக் இயக்கத்தைப் பயன்படுத்தலாம், அதாவது ரோபோவை இயக்க அழுத்தத்தின் கீழ் ஹைட்ராலிக் திரவத்தைப் பயன்படுத்துதல் அல்லது நியூமேடிக் இயக்கத்தைப் பயன்படுத்துதல், அதாவது இயந்திர இயக்கத்தை ஏற்படுத்த அழுத்தப்பட்ட காற்றைப் பயன்படுத்துதல். இருப்பினும் மிகவும் பயனுள்ள வழி தேவையான இயக்கத்தை வழங்க மோட்டார்கள் பயன்படுத்துவதாகும். ரோபோ மற்றும் இறுதி செயல்திறனுக்கு தேவையான இயக்கத்தை வழங்க மோட்டார்கள் கட்டுப்படுத்தப்பட வேண்டும்.
ஒரு தேர்வு என் இடம் ரோபோவைக் கட்டுப்படுத்துவதற்கான வேலை எடுத்துக்காட்டு
விசைப்பலகையில் சில பொத்தான்களைக் கொண்டு ரோபோவைக் கட்டுப்படுத்துவது எப்படி? ஆம், அது சாத்தியம்! தேவையான பொத்தானை அழுத்தினால், எங்கள் பணியை அடைய எந்த திசையிலும் நகர்த்தும்படி கட்டளை ரோபோவுக்கு அனுப்பலாம். மேலும் எளிய வயர்லெஸ் தகவல்தொடர்புகளைப் பயன்படுத்தி இதை அடைய முடியும்.
இது உண்மையில் எவ்வாறு செயல்படுகிறது என்பதைப் பார்ப்போம்:
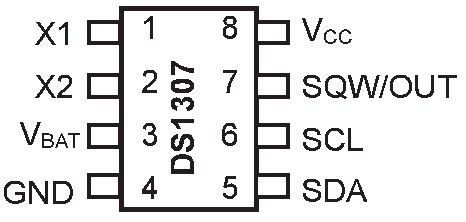
டிரான்ஸ்மிட்டர் பகுதி மைக்ரோகண்ட்ரோலருடன் இணைக்கப்பட்ட விசைப்பலகையைக் கொண்டுள்ளது. தசம வடிவத்தில் உள்ள எந்த பொத்தான் எண்ணும் மைக்ரோகண்ட்ரோலரால் 4 இலக்க பைனரியாக மாற்றப்பட்டு அதன் துறைமுகத்தில் ஒன்றின் இணையான வெளியீடு குறியாக்கிக்கு பயன்படுத்தப்படுகிறது. குறியாக்கி இந்த இணையான தரவை தொடர் தரவுகளாக மாற்றுகிறது, இது டிரான்ஸ்மிட்டருக்கு வழங்கப்படுகிறது, இது தொடர் தரவை அனுப்ப ஆண்டெனாவுடன் பொருத்தப்படுகிறது.

ஒரு தேர்வு N இடம் ரோபோவின் டிரான்ஸ்மிட்டரைக் காட்டும் தொகுதி வரைபடம்
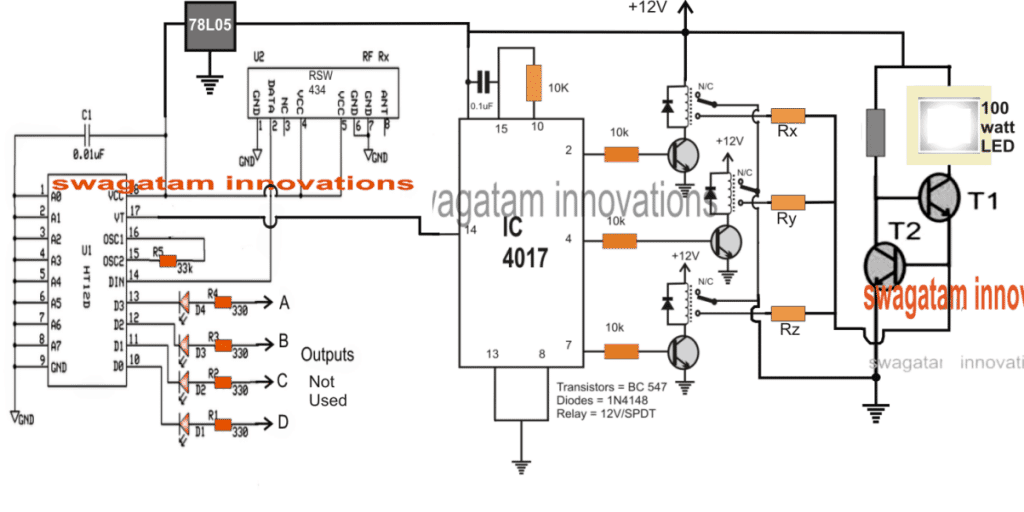
ரிசீவர் பக்கமானது மைக்ரோகண்ட்ரோலருடன் இணைக்கப்பட்ட ஒரு டிகோடரைக் கொண்டுள்ளது. டிகோடர் பெறப்பட்ட கட்டளையை தொடர் வடிவத்தில் இணையான வடிவமாக மாற்றுகிறது மற்றும் இந்த தரவை மைக்ரோகண்ட்ரோலருக்கு வழங்குகிறது. இந்த கட்டளையின் அடிப்படையில் மைக்ரோகண்ட்ரோலர் அந்தந்த மோட்டார்கள் இயக்க மோட்டார் டிரைவர்களுக்கு பொருத்தமான உள்ளீட்டு சமிக்ஞைகளை அனுப்புகிறது.

தேர்வு வரைபடம் ஒரு தேர்வு என் இடம் ரோபோவின் பெறுநரைக் காட்டுகிறது
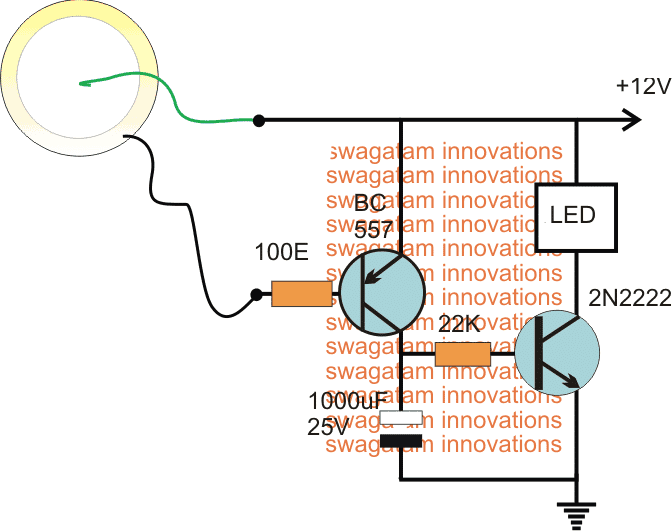
இந்த அமைப்பு முழு ரோபோவிற்கும் இயக்கத்தை வழங்க இரண்டு மோட்டார்கள் மற்றும் கை இயக்கத்தை வழங்க இரண்டு மோட்டார்கள் கொண்டுள்ளது. பொருளை திறம்பட கையாள, அதற்கு ஒரு கொடுக்க, சரியான அழுத்தத்தை செலுத்த இறுதி செயல்திறன் அல்லது கிரிப்பரைக் கட்டுப்படுத்த வேண்டும். மென்மையான பிடியில் . முறையான கட்டளை மூலம் கை மோட்டார்கள் கட்டுப்படுத்துவதன் மூலம் இது உறுதி செய்யப்படுகிறது. கை மோட்டார்கள் வெளியீடு 10Ohms / 2W மின்தடையுடன் இணைக்கப்பட்டுள்ளது மற்றும் மோட்டார் ஓவர் சுமை அல்லது பூட்டப்பட்ட நிலையில், மின்தடையின் குறுக்கே ஒரு உயர் மின்னழுத்தம் உருவாக்கப்படுகிறது, இது ஆப்டோசோலேட்டரின் வெளியீட்டில் ஒரு தர்க்க உயர் மட்டத்தை ஏற்படுத்துகிறது மற்றும் குறுக்கீடு செய்கிறது ஒரு பிஎன்பி டிரான்சிஸ்டர் மூலம் ஆப்டோசோலேட்டர் வெளியீட்டில் இணைக்கப்பட்ட மைக்ரோகண்ட்ரோலரின் முள் தர்க்கம் குறைந்த சமிக்ஞையைப் பெறுகிறது, இது கிரிப்பரின் மற்ற அனைத்து செயல்பாடுகளையும் நிறுத்துகிறது.
எனவே எளிய RF தகவல்தொடர்பு மூலம், நாம் உண்மையில் ஒரு தேர்வு மற்றும் இட ரோபோவைக் கட்டுப்படுத்தலாம்.
தேர்வு மற்றும் இடம் ரோபோவின் நடைமுறை பயன்பாடுகள்:
- பாதுகாப்பு பயன்பாடுகள் : இது கண்காணிப்புக்காகவும், குண்டுகள் போன்ற தீங்கு விளைவிக்கும் பொருட்களை எடுத்து பாதுகாப்பாக பரப்பவும் பயன்படுத்தப்படலாம்.
- தொழில்துறை பயன்பாடுகள் : இந்த ரோபோக்கள் உற்பத்தியில் பயன்படுத்தப்படுகின்றன, தேவையான பகுதிகளை எடுத்து, இயந்திர சாதனங்களை முடிக்க சரியான நிலையில் வைக்கவும். கன்வேயர் பெல்ட்டில் பொருட்களை வைக்கவும், கன்வேயர் பெல்ட்டிலிருந்து குறைபாடுள்ள தயாரிப்புகளை எடுக்கவும் இது பயன்படுத்தப்படலாம்.
- மருத்துவ பயன்பாடுகள் : இந்த ரோபோக்களை கூட்டு மாற்று அறுவை சிகிச்சை, எலும்பியல் மற்றும் உள் அறுவை சிகிச்சை போன்ற பல்வேறு அறுவை சிகிச்சை நடவடிக்கைகளில் பயன்படுத்தலாம். இது மிகவும் துல்லியமாகவும் துல்லியமாகவும் செயல்பாடுகளை செய்கிறது.
இந்த பயன்பாடுகளைத் தவிர, இந்த ரோபோக்கள் மனிதகுலத்திற்கு ஏற்ற பல்வேறு பயன்பாடுகளிலும் பயன்படுத்தப்படலாம்.
இப்போது கேள்வி எஞ்சியுள்ளது- ரோபோக்கள் மனிதர்களுக்கான வழியை முழுவதுமாக எளிதாக்கப் போகும் நாள் எவ்வளவு தூரம்?