டி.சி மோட்டார் கன்ட்ரோலரை இந்த இடுகை விளக்குகிறது, இது ஒரு சுமை பொருட்படுத்தாமல் நிலையான வேகத்தில் மோட்டாரை இயக்குவதற்கு நிலையான முறுக்கு இழப்பீட்டைக் கொண்டுள்ளது.
சாதாரண வேகக் கட்டுப்பாட்டாளர்களின் குறைபாடு
பெரும்பான்மையினரின் ஒரு குறைபாடு எளிய வேக கட்டுப்படுத்திகள் அவை முன்னரே தீர்மானிக்கப்பட்ட நிலையான மின்னழுத்தத்துடன் மட்டுமே மோட்டாரை வழங்குகின்றனவா? இதன் விளைவாக, முறுக்கு இழப்பீடு இல்லாததால், வேகம் நிலையானதாக இருக்காது மற்றும் மோட்டரில் உள்ள சுமைகளுடன் மாறுபடும்.
எடுத்துக்காட்டாக, ஒரு மாதிரி ரயிலில், எளிய கட்டுப்படுத்திகளுடன், ஏறும் சாய்வுகளுக்கு ரயிலின் வேகம் படிப்படியாகக் குறைந்து, கீழ்நோக்கிச் செல்லும்போது வேகப்படுத்துகிறது.
எனவே மாடல் ரயில்களுக்கு, தேர்ந்தெடுக்கப்பட்ட மோட்டார் வேகத்தைத் தக்கவைக்க பானை கட்டுப்பாட்டு சரிசெய்தல் அதேபோல் இயந்திரம் இழுக்கக்கூடிய சுமைகளைப் பொறுத்து மாறுபடும்.
இந்த கட்டுரையில் விளக்கப்பட்டுள்ள நிலையான முறுக்கு மோட்டார் வேக கட்டுப்பாட்டு சுற்று, மோட்டார் வேகத்தைக் கண்காணிப்பதன் மூலமும், முன்னரே தீர்மானிக்கப்பட்ட கட்டுப்பாட்டு அமைப்பிற்கு மாறாமல் பராமரிப்பதன் மூலமும் இந்த சிக்கலில் இருந்து விடுபடுகிறது, மோட்டாரில் என்ன சுமை இருந்தாலும் சரி.
டிசி நிரந்தர காந்த மோட்டாரைப் பயன்படுத்தும் பெரும்பாலான மாடல்களில் சுற்று பயன்படுத்தப்படலாம்.
பின் ஈ.எம்.எஃப் காரணி கணக்கிடுகிறது
மோட்டார் டெர்மினல்களில் உள்ள மின்னழுத்தம் இரண்டு காரணிகளைக் கொண்டுள்ளது, பின்புறம் e.m.f. மோட்டார் உற்பத்தி, மற்றும் மின்னழுத்தம் ஆர்மேச்சர் எதிர்ப்பு முழுவதும் குறைந்தது.
பின்புறம் e.m.f. மோட்டார் முறுக்கு மூலம் உருவாக்கப்படுவது பொதுவாக மோட்டார் வேகத்திற்கு விகிதாசாரமாகும், அதாவது இந்த பின் emf உள்ளடக்கத்தை அளவிடுவதன் மூலம் மோட்டார் வேகத்தை கண்காணிக்க முடியும். ஆனால், முக்கிய பிரச்சினை பின்புறத்தை தனிமைப்படுத்தி கண்டறிவது e.m.f. ஆர்மேச்சர் எதிர்ப்பு மின்னழுத்தத்திலிருந்து.
ஒரு தனி மின்தடையம் மோட்டருடன் தொடர்ச்சியாக இணைக்கப்பட்டுள்ளது என்று கருதி, ஒரு பொதுவான ஒற்றை மின்னோட்டம் இந்த மின்தடையின் வழியாகவும், ஆர்மேச்சர் எதிர்ப்பின் வழியாகவும் செல்கிறது என்பதைக் கருத்தில் கொண்டு, இரண்டு தொடர் மின்தடையங்கள் முழுவதும் மின்னழுத்த வீழ்ச்சி ஆர்மேச்சர் எதிர்ப்பின் வீழ்ச்சிக்கு சமமாக இருக்கும்.
உண்மையில், இந்த இரண்டு எதிர்ப்பு மதிப்புகள் ஒரே மாதிரியாக இருக்கும்போது, ஒவ்வொரு மின்தடையங்களிலும் உள்ள இரண்டு மின்னழுத்த அளவுகளும் ஒத்ததாக இருக்கும் என்று கருதலாம். இந்த தரவு மூலம், மோட்டார் மின்னழுத்தத்திலிருந்து R3 இன் மின்னழுத்த வீழ்ச்சியைக் கழிக்க முடியும், மேலும் செயலாக்கத்திற்குத் தேவையான e.m.f மதிப்பைப் பெறலாம்.

நிலையான முறுக்குக்கு ஈ.எம்.எஃப்
முன்மொழியப்பட்ட சுற்று தொடர்ந்து பின்புறத்தை கண்காணிக்கிறது e.m.f. அதன்படி மோட்டார் மின்னோட்டத்தை ஒழுங்குபடுத்துகிறது, ஒதுக்கப்பட்ட பானை கட்டுப்பாட்டு அமைப்பிற்கு, பின்புற e.m.f., மோட்டார் வேகத்துடன் நிலையான முறுக்குவிசையில் பராமரிக்கப்படுவதை உறுதி செய்கிறது.
சுற்று விளக்கத்தை எளிதாக்குவதற்கு, பி 2 சரிசெய்யப்பட்டு அதன் மைய நிலைக்கு வைக்கப்படுவதாகக் கருதப்படுகிறது, மேலும் மின்தடை ஆர் 3 மோட்டார் ஆர்மேச்சரின் எதிர்ப்பு மதிப்புக்கு சமமாக தேர்ந்தெடுக்கப்படுகிறது.
மோட்டார் மின்னழுத்தத்தை கணக்கிடுகிறது
பின்புறத்தை சேர்ப்பதன் மூலம் மோட்டார் மின்னழுத்தத்தை கணக்கிடலாம் e.m.f. மின்னழுத்தத்துடன் Va மோட்டார் உள் எதிர்ப்பு Vr.
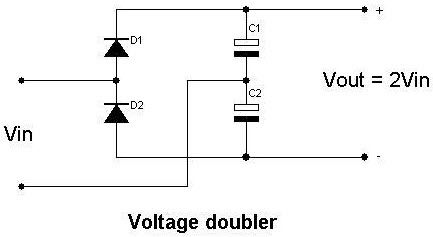
R3 ஒரு மின்னழுத்த Vr ஐக் குறைப்பதைக் கருத்தில் கொண்டு, வெளியீட்டு மின்னழுத்தம் Vo Va + 2 V க்கு சமமாக இருக்கும்.
IC1 இன் தலைகீழ் உள்ளீட்டில் (-) மின்னழுத்தம் Va + Vr ஆகவும், தலைகீழ் அல்லாத உள்ளீட்டில் (+) Vi + (Va + 2Vr - Vi) / 2 ஆகவும் இருக்கும்
மேலே உள்ள இரண்டு மின்னழுத்த அளவுகள் சமமாக இருக்க வேண்டும் என்பதால், மேற்கண்ட சமன்பாட்டை இவ்வாறு ஒழுங்கமைக்கிறோம்:
Va + Vr = Vi + (Va + 2Vr - Vi) / 2
இந்த சமன்பாட்டை எளிதாக்குவது Va = Vi ஐ வழங்குகிறது.
மேலே உள்ள சமன்பாடு பின்புறம் e.m.f. கட்டுப்பாட்டு மின்னழுத்தத்தின் அதே மட்டத்தில் மோட்டார் தொடர்ந்து வைக்கப்படுகிறது. இது பி 1 வேக சரிசெய்தலின் எந்தவொரு குறிப்பிட்ட அமைப்பிற்கும் நிலையான வேகம் மற்றும் முறுக்குடன் செயல்பட மோட்டரை அனுமதிக்கிறது.
ஆர் 3 எதிர்ப்புக்கும் ஆர்மேச்சர் எதிர்ப்பிற்கும் இடையிலான வேறுபாடு அளவை ஈடுசெய்ய பி 2 சேர்க்கப்பட்டுள்ளது. தலைகீழ் அல்லாத உள்ளீட்டு ஒப் ஆம்பில் நேர்மறையான பின்னூட்டத்தின் அளவை சரிசெய்வதன் மூலம் இது செயல்படுகிறது.
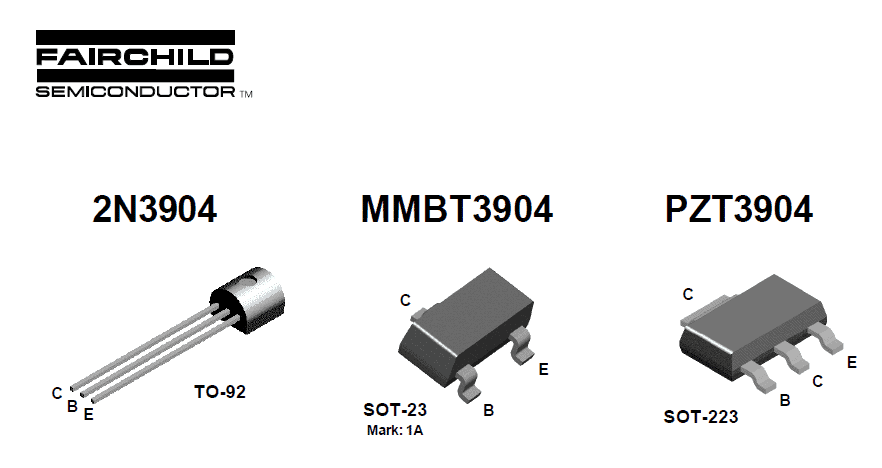
ஒப் ஆம்ப் எல்எம் 3140 அடிப்படையில் மோட்டார் ஆர்மேச்சர் முழுவதும் உருவாக்கப்பட்ட மின்னழுத்தத்தை மோட்டார் முழுவதும் பின்புற எம்எஃப் சமத்துடன் ஒப்பிடுகிறது மற்றும் டி 1 2 என் 3055 இன் அடிப்படை திறனை ஒழுங்குபடுத்துகிறது.
T1 ஒரு கட்டமைக்கப்பட்டுள்ளது உமிழ்ப்பான் பின்தொடர்பவர் மோட்டரின் வேகத்தை அதன் அடிப்படை திறனுக்கு ஏற்ப ஒழுங்குபடுத்துகிறது. ஒப் ஆம்பினால் அதிக பின்புற எம்.எஃப் கண்டறியப்பட்டால், அது மோட்டார் முழுவதும் மின்னழுத்தத்தை அதிகரிக்கிறது, இதன் விளைவாக மோட்டார் வேகம் அதிகரிக்கும், மற்றும் நேர்மாறாகவும்.
முறையான செயல்பாட்டிற்கு பொருத்தமான ஹீட்ஸின்க் மீது டி 1 பொருத்தப்பட வேண்டும்.
சுற்று அமைப்பது எப்படி
நிலையான முறுக்கு மோட்டார் வேக கட்டுப்பாட்டு சுற்று சுற்று அமைப்பது ஏற்றுதல் நிலைமைகளைப் பொருட்படுத்தாமல் மோட்டார் ஒரு நிலையான முறுக்குநிலையை அடையும் வரை மாறுபட்ட சுமைகளுடன் மோட்டருடன் பி 2 ஐ சரிசெய்வதன் மூலம் செய்யப்படுகிறது.
மாதிரி ரயில்களுக்கு சுற்று பயன்படுத்தப்படும்போது, பி 2 ஐ பி 1 ஐ அதிகம் திருப்பாமல் பார்த்துக் கொள்ள வேண்டும், இதனால் மாடல் ரயில் வேகம் குறையக்கூடும், மாறாக பி 2 ஐ எதிர் திசையில் அதிகம் திருப்பக்கூடாது, இதன் விளைவாக ஏற்படலாம் ஒரு மேல்நோக்கி சாய்வு ஏறும் போது ரயில் வேகம் உண்மையில் வேகமாகிறது.
முந்தைய: எளிய நி-சிடி பேட்டரி சார்ஜர் சுற்றுகள் ஆராயப்பட்டன அடுத்து: மினி டிரான்ஸ்ஸீவர் சுற்று