
வழக்கமாக, ரிமோட் கண்ட்ரோல் ரோபோக்கள் RF சுற்றுகளைப் பயன்படுத்துகின்றன, அவை வரையறுக்கப்பட்ட பணி வரம்பு, வரையறுக்கப்பட்ட கட்டுப்பாடு மற்றும் வரையறுக்கப்பட்ட அதிர்வெண் வரம்பின் குறைபாடுகளைக் கொண்டுள்ளன. இந்த குறைபாடுகளை சமாளிக்க, செல்போன் இயக்கப்படும் லேண்ட் ரோவர் ரோபோ வாகனம் பயன்படுத்தப்படுகிறது. இது ரோபோ கட்டுப்பாடு, ஊடுருவல் இலவச கட்டுப்படுத்திகள் மற்றும் பன்னிரண்டு கட்டுப்பாட்டு அமைப்புகள் போன்றவற்றின் நன்மைகளை வழங்குகிறது.
திறன்கள் மற்றும் தோற்றம் என்றாலும் உட்பொதிக்கப்பட்ட ரோபாட்டிக்ஸ் அனைத்து ரோபோக்களும் ஏதேனும் ஒரு கட்டுப்பாட்டின் கீழ் நகரக்கூடிய, இயந்திர கட்டமைப்பின் அம்சங்களைப் பகிர்ந்து கொள்கின்றன. ரோபோக்களின் கட்டுப்பாடு என்பது மூன்று வெவ்வேறு கட்டங்களை உள்ளடக்கியது, அவை கருத்து, செயலாக்கம் மற்றும் செயல். பொதுவாக, சென்சார்கள் ரோபோவில் பொருத்தப்படுகின்றன. கருத்து மற்றும் செயலாக்கம் ஆன்-போர்டு மைக்ரோகண்ட்ரோலரால் செய்யப்படுகிறது, மேலும் நடவடிக்கை மோட்டார்கள் பயன்படுத்தி செய்யப்படுகிறது.
செல்போன் இயக்கப்படும் லேண்ட் ரோவர் ரோபோடிக் வாகனம்

செல்போன் இயக்கப்படும் லேண்ட் ரோவர் ரோபோடிக் வாகனம் எட்ஜ்ஃப்கிட்ஸ்.காம்
இந்த திட்டத்தின் முக்கிய நோக்கம் ஒரு மொபைல் தொலைபேசியைப் பயன்படுத்தி ரோபோ வாகனத்தில் பொருத்தப்பட்ட ஒரு ரோபோ கையை கட்டுப்படுத்துவதாகும். இது ஒரு பெரிய வேலை வரம்பு மற்றும் வலுவான கட்டுப்பாடு போன்றவற்றை வழங்குகிறது.
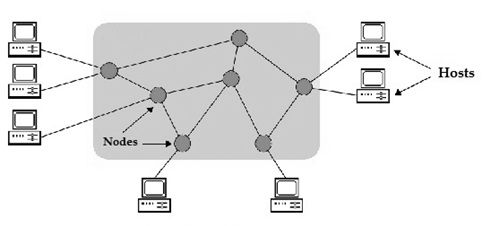
செல்போன் இயக்கப்படும் லேண்ட் ரோவர் ரோபோ வாகனத்தின் தொகுதி வரைபடம்:

செல்போன் இயக்கப்படும் லேண்ட் ரோவரின் தடுப்பு வரைபடம்
மைக்ரோகண்ட்ரோலர், செல்போன், டிடிஎம்எஃப் டிகோடர் மற்றும் டிசி-மோட்டார்-டிரைவர் சர்க்யூட் ஆகியவை முக்கிய கட்டுமான தொகுதிகள். செல்போன் முழு அமைப்பின் மிக முக்கியமான பகுதியாகும், ஏனெனில் முழு அமைப்பும் செயல்படுகிறது மற்றும் செல்போன் மூலம் செயல்படுத்தப்படுகிறது. டி.டி.எம்.எஃப் (இரட்டை தொனி பல அதிர்வெண்) செல்போனிலிருந்து உள்ளீட்டு சமிக்ஞையைப் பெற்று அதை டிகோட் செய்து, பின்னர் 4-பிட்-டிஜிட்டல் வெளியீட்டை உருவாக்குகிறது 8051 மைக்ரோகண்ட்ரோலர் . டிடிஎம்எஃப் டிகோடர் டிஜிட்டல் வெளியீட்டைக் கொடுக்கும்போது, அது ஒவ்வொரு முறையும் ஒரு குறுக்கீட்டை உருவாக்குகிறது.
மைக்ரோகண்ட்ரோலர் முழு அமைப்பின் இதயமாகும், ஏனெனில் இது முழு கட்டுப்பாட்டு செயல்களையும் செய்கிறது. டி.சி.எம் மோட்டார்கள் சுழற்றுவதன் மூலம் ரோவரை வலது அல்லது இடது மற்றும் முன்னோக்கி அல்லது பின்னோக்கி நகர்த்த டி.டி.எம்.எஃப் டிகோடரால் உருவாக்கப்படும் குறியீட்டை மைக்ரோகண்ட்ரோலர் சார்ந்துள்ளது. டி.சி மோட்டார் டிரைவர் மைக்ரோகண்ட்ரோலரிடமிருந்து குறைந்த அல்லது உயர் தர்க்கத்தின் அடிப்படையில் செயல்படுத்தும் சமிக்ஞைகளைப் பெறுகிறது, பின்னர் அது இரண்டு திசைகளிலும் இரண்டு மோட்டார்கள் பெருக்கி சுழற்றுகிறது.
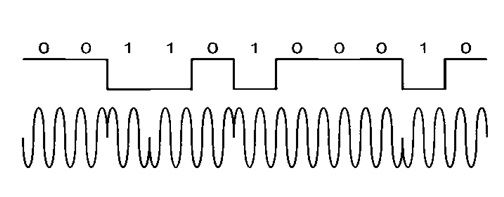
ரோபோவின் கட்டுப்பாடு முக்கியமாக நான்கு வெவ்வேறு கட்டங்களை உள்ளடக்கியது: கருத்து, செயல் செயலாக்கம் மற்றும் கண்டறிதல். புலனுணர்வு கட்டத்தில் ரோபோவுடன் இணைக்கப்பட்ட செல்போன் அழைப்பைப் பெற்றால், செல்போனில் விசையின் அழுத்தும் செயல் உருவாக்கப்பட்ட டிடிஎம்எஃப் தொனியைக் குறிக்கிறது. பின்னர், டிகோடர் சிப் செல்போனிலிருந்து ஆடியோ சிக்னலைப் பெறுகிறது, பின்னர் டிடிஎம்எஃப் தொனியை பைனரி குறியீடாக மாற்றுகிறது, பின்னர் அது மைக்ரோகண்ட்ரோலருக்கு வழங்கப்படுகிறது. இந்த திட்டத்தில், MT88710 ஐசி டிடிஎம்எஃப் டிகோடராக பயன்படுத்தப்படுகிறது. செயலாக்க கட்டத்தில், டி.டி.எம்.எஃப் டிகோடரிலிருந்து பெறப்பட்ட பைனரி குறியீட்டை மைக்ரோகண்ட்ரோலர் செயலாக்குகிறது. தி மைக்ரோகண்ட்ரோலர் ‘சி’ இல் முன் திட்டமிடப்பட்டுள்ளது உள்ளீட்டு பிட்களுக்கு ஏற்ப இந்த குறிப்பிட்ட பணியைச் செய்ய.
செயல் கட்டத்தில், மோட்டார்களின் சுழற்சி மைக்ரோகண்ட்ரோலர் கொடுத்த உள்ளீட்டைப் பொறுத்தது. 30 ஆர்.பி.எம் ஒவ்வொன்றும் இரண்டு டி.சி மோட்டார்கள் லேண்ட்ரோவருக்குப் பயன்படுத்தப்படுகின்றன, மேலும் அவை மோட்டார்-டிரைவர் ஐ.சி. மேடையை கண்டறிந்ததும், தடையாக கண்டறிவதற்கும், ஒரு அகச்சிவப்பு டிரான்ஸ்மிட்டர் மற்றும் ரிசீவர் பஸருடன் சேர்ந்து பயன்படுத்தப்படுகின்றன. ரோபோவுக்கு முன்னால் தடையாக வரும்போது, ஐஆர் டிரான்ஸ்மிட்டர் பொருளின் மீது ஐஆர் கதிர்களை கடத்துகிறது, பின்னர் பொருள் ஐஆர் கதிர்களை ஐஆர் ரிசீவருக்கு பிரதிபலிக்கிறது. ஐஆர் ரிசீவர் பின்னர் பஸரை செயல்படுத்த ஐஆர் கதிர்களைப் பெறுகிறது.
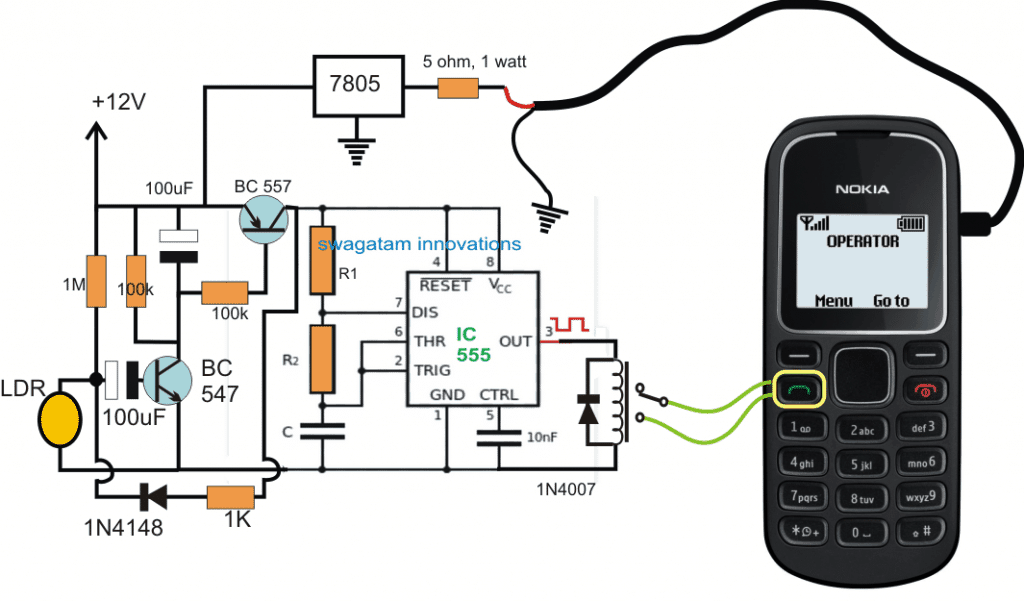
செல்போன் இயக்கப்படும் லேண்ட் ரோவர் ரோபோடிக் வாகனத்தின் சுற்று வரைபடம்:
இந்த செல்போன் மூலம் இயக்கப்படும் ரோபோ லேண்ட்ரோவரின் முக்கிய கூறுகள் மைக்ரோகண்ட்ரோலர், மோட்டார் டிரைவர் மற்றும் டிடிஎம்எஃப் டிகோடர். இந்த திட்டத்தில் ஒரு MT8870 தொடர் டிடிஎம்எஃப் டிகோடர் பயன்படுத்தப்படுகிறது, இது 16 டிடிஎம்எஃப் டோன் ஜோடிகளை 4-பிட் குறியீடு வெளியீட்டில் கண்டறிய டிஜிட்டல் எண்ணும் நுட்பங்களைப் பயன்படுத்துகிறது. உள்ளமைக்கப்பட்ட டயல்டோன் சுற்று முன் வடிகட்டலை நீக்குகிறது. பின் 2 இல் உள்ளீட்டு சமிக்ஞை வழங்கப்பட்டால், உள்ளீட்டு உள்ளமைவு பயனுள்ளதாக இருக்கும். டிடிஎம்எஃப் தொனியின் 4-பிட்-டிகோட் சமிக்ஞை பின் 14 இன் வெளியீடு மூலம் பின் 11 க்கு மாற்றப்படுகிறது. இந்த ஊசிகளை மைக்ரோகண்ட்ரோலர் ஊசிகளான பாவோ, பா 1, பா 2 மற்றும் பா 3 உடன் இணைக்கப்பட்டுள்ளது. துறைமுக ஊசிகளான PD0 இலிருந்து PD3 மற்றும் PD7 வழியாக மைக்ரோகண்ட்ரோலரின் வெளியீடு IN1, IN4 உள்ளீடுகளுக்கு வழங்கப்படுகிறது மற்றும் மோட்டார்-இயக்கி L293D IC இன் EN1, EN2 ஊசிகளை செயல்படுத்துகிறது இரண்டு டிசி மோட்டார்கள் இயக்கவும் .

செல்போன் இயக்கப்படும் லேண்ட் ரோவரின் சுற்று வரைபடம்
இந்த சுற்றில், கையேடு மீட்டமைப்பிற்கு S1 சுவிட்ச் பயன்படுத்தப்படுகிறது. டி.சி மோட்டார்கள் இயக்க மைக்ரோகண்ட்ரோலரின் வெளியீடு போதுமானதாக இல்லை, எனவே தற்போதைய சுழற்சிகள் மோட்டார் சுழற்சிக்கு அவசியமானவை. எல் 293 டி மோட்டார் இயக்கி 4.5 வி முதல் 36 வி வரையிலான மின்னழுத்தங்களில் 600 எம்ஏ வரை இருதரப்பு இயக்கி நீரோட்டங்களை வழங்க வடிவமைக்கப்பட்டுள்ளது, இதனால் இது DC மோட்டார்கள் இயக்க எளிதானது. எல் 293 டி மோட்டார் டிரைவர் நான்கு டிரைவர்களைக் கொண்டுள்ளது. IN4 மற்றும் OUT1 மற்றும் OUT4 வழியாக உள்ள ஊசிகளானது இயக்கி 1 இன் இயக்கி 4 இன் உள்ளீடு மற்றும் வெளியீட்டு ஊசிகளாகும். இயக்கிகள் 1,2,3 மற்றும் 4 இயக்கப்பட்ட பின் 1 (EN1) மற்றும் முள் 9 (EN2) மூலம் இயக்கப்படுகின்றன. உள்ளீட்டு EN1 (pin1) அதிகமாக இருக்கும்போது, இயக்கிகள் 1 மற்றும் 2 இயக்கப்பட்டன. இதேபோல், இயக்கு உள்ளீடு EN2 (pin9) இயக்கிகள் 3 ஐ இயக்குகிறது.
நன்மைகள் மற்றும் தீமைகள்:
செல்போன்-இயக்கப்படும்-ரோபோ லேண்ட்ரோவரின் நன்மைகள் வயர்லெஸ் கட்டுப்பாட்டு வழங்கல் மற்றும் கண்காணிப்பு அமைப்பு, 3 ஜி-தொழில்நுட்ப அடிப்படையிலான வாகன வழிசெலுத்தல் மற்றும் செல்போனின் நெட்வொர்க்கை அடிப்படையாகக் கொண்ட வரம்பற்ற செயல்பாட்டு வரம்பு ஆகியவை அடங்கும். குறைபாடு பின்வருமாறு: செல்போன் பில்லிங் செலவாகும் மொபைல் பேட்டரிகள் வெளியேற்றம் : விரைவான வெளியேற்றத்தின் காரணமாக பேட்டரிகளின் இழப்பு கட்டணம் என பேட்டரிகளுடன் தொடர்புடைய வெளியேற்றும் சிக்கல், ஏனெனில் சுமை அதிக தகவமைப்பு திறன் கொண்டது: கணினி அனைத்து செல்போன்களுக்கும் பொருந்தாது, ஆனால் ஹெட்செட் இணைக்கப்பட்டவை மட்டுமே பயன்படுத்தப்பட முடியும்.
எனவே, இந்த செல்போன் மூலம் இயக்கப்படும் ரோபோ திட்டம் மொபைல் பயன்பாடுகளைப் பயன்படுத்தி இராணுவ வாகனங்களை கட்டுப்படுத்த இராணுவ பயன்பாடுகளில் மிகவும் பயனுள்ளதாக இருக்கும். எதிர்காலத்தில், ஒரு ஏற்பாடு செய்வதன் மூலம் எதிரிகளின் நிலையை நாம் கண்டறிய முடியும் வயர்லெஸ் கேமரா லேண்ட் ரோவர் ரோபோ வாகனத்திற்கு. இந்த திட்டத்தில் முன்மொழியப்பட்ட பல்வேறு சொற்களையும் கொள்கைகளையும் மாணவர்கள் கற்றுக்கொள்ள முடியும் என்பதால் இந்த திட்டம் கல்வியாளர்களுக்கும் உதவியாக இருக்கும். இந்த திட்டம் மாணவர்கள் தங்கள் புதுமையான எண்ணங்களையும் யோசனைகளையும் சேர்க்க உதவும் ரோபாட்டிக்ஸ் திட்டங்களை உருவாக்குதல் .
புகைப்பட வரவு:
- செல்போன் இயக்கப்படும் லேண்ட் ரோவர் santoshbanisetty
- செல்போன் இயக்கப்படும் லேண்ட் ரோவரின் சுற்று வரைபடம் பொறியாளர்கள்








{kind=link}