இந்த இடுகையில், சரியான பக் மாற்றி தூண்டியை வடிவமைக்க தேவையான பல்வேறு அளவுருக்களைப் புரிந்துகொள்ள முயற்சிப்போம், அதாவது தேவையான வெளியீடு அதிகபட்ச செயல்திறனை அடைய முடியும்.
எங்கள் முந்தைய இடுகையில் நாங்கள் கற்றுக்கொண்டோம் பக் மாற்றிகள் அடிப்படைகள் மற்றும் டிரான்சிஸ்டரின் ON நேரத்தைப் பற்றிய முக்கியமான அம்சத்தை PWM இன் குறிப்பிட்ட நேரத்தைப் பொறுத்து உணர்ந்தது, இது பக் மாற்றியின் வெளியீட்டு மின்னழுத்தத்தை அடிப்படையில் தீர்மானிக்கிறது.
இந்த இடுகையில் நாம் கொஞ்சம் ஆழமாகச் சென்று உள்ளீட்டு மின்னழுத்தம், டிரான்சிஸ்டரின் நேரம் மாறுதல், வெளியீட்டு மின்னழுத்தம் மற்றும் பக் தூண்டியின் மின்னோட்டம் ஆகியவற்றுக்கு இடையிலான உறவை மதிப்பீடு செய்ய முயற்சிப்போம், மேலும் பக் தூண்டியை வடிவமைக்கும்போது இவற்றை எவ்வாறு மேம்படுத்துவது என்பது பற்றியும்.

பக் மாற்றி விவரக்குறிப்புகள்
பக் மாற்றி சம்பந்தப்பட்ட பல்வேறு அளவுருக்களை முதலில் புரிந்துகொள்வோம்:
உச்ச தூண்டல் மின்னோட்டம், ( நான்pk ) = இது ஒரு தூண்டல் நிறைவு பெறுவதற்கு முன்பு சேமிக்கக்கூடிய அதிகபட்ச மின்னோட்டமாகும். இங்கே 'நிறைவுற்றது' என்ற வார்த்தையின் பொருள், டிரான்சிஸ்டர் மாறுதல் நேரம் மிக நீளமாக இருப்பதால், தூண்டல் அதன் அதிகபட்ச அல்லது உச்ச மின்னோட்ட சேமிப்புத் திறனைத் தாண்டிய பிறகும் அது தொடர்ந்து இயங்குகிறது. இது ஒரு விரும்பத்தகாத சூழ்நிலை மற்றும் தவிர்க்கப்பட வேண்டும்.
குறைந்தபட்ச தூண்டல் மின்னோட்டம், ( நான்அல்லது ) = இது மின்தேக்கியை அடைய அனுமதிக்கும் மின்னோட்டத்தின் குறைந்தபட்ச அளவு, அதன் சேமிக்கப்பட்ட ஆற்றலை பின் ஈ.எம்.எஃப் வடிவத்தில் வெளியிடுவதன் மூலம் தூண்டல் வெளியேற்றும் போது.
பொருள், டிரான்சிஸ்டர் அணைக்கப்படும் போது, தூண்டல் அதன் சேமிக்கப்பட்ட ஆற்றலை சுமைக்கு வெளியேற்றுகிறது மற்றும் நிச்சயமாக அதன் சேமிக்கப்பட்ட மின்னோட்டம் அதிவேகமாக பூஜ்ஜியத்தை நோக்கிச் செல்கிறது, இருப்பினும் அது பூஜ்ஜியத்தை அடைவதற்கு முன்பு டிரான்சிஸ்டர் மீண்டும் இயக்கப்பட வேண்டும், இது டிரான்சிஸ்டர் மீண்டும் இயக்கக்கூடிய புள்ளி குறைந்தபட்ச தூண்டல் மின்னோட்டமாக அழைக்கப்படுகிறது.
மேலே உள்ள நிபந்தனை a க்கான தொடர்ச்சியான பயன்முறை என்றும் அழைக்கப்படுகிறது பக் மாற்றி வடிவமைப்பு .
தூண்டல் மின்னோட்டம் பூஜ்ஜியத்திற்குக் குறையுமுன் டிரான்சிஸ்டர் மீண்டும் இயங்கவில்லை என்றால், நிலைமை இடைவிடாத பயன்முறையாகக் குறிப்பிடப்படலாம், இது பக் மாற்றி இயக்க ஒரு விரும்பத்தகாத வழியாகும், மேலும் இது கணினியின் திறமையற்ற வேலைக்கு வழிவகுக்கும்.
சிற்றலை மின்னோட்டம், (Δi = நான்pk - நான்அல்லது ) = அருகிலுள்ள சூத்திரத்திலிருந்து காணக்கூடியது, சிற்றலை Δ பக் தூண்டியில் தூண்டப்பட்ட உச்ச மின்னோட்டத்திற்கும் குறைந்தபட்ச மின்னோட்டத்திற்கும் உள்ள வித்தியாசம் நான்.
பக் மாற்றியின் வெளியீட்டில் ஒரு வடிகட்டி மின்தேக்கி பொதுவாக இந்த சிற்றலை மின்னோட்டத்தை உறுதிப்படுத்துகிறது மற்றும் ஒப்பீட்டளவில் நிலையானதாக மாற்ற உதவும்.
கடமை சுழற்சி, (டி = டிஆன் / டி) = டிரான்சிஸ்டரின் ON நேரத்தை குறிப்பிட்ட காலத்தால் வகுப்பதன் மூலம் கடமை சுழற்சி கணக்கிடப்படுகிறது.
கால இடைவெளி என்பது ஒரு பி.டபிள்யூ.எம் சுழற்சியை முடிக்க எடுக்கும் மொத்த நேரம், அதாவது டிரான்சிஸ்டருக்கு ஒரு பி.டபிள்யூ.எம்.
டிரான்சிஸ்டரின் நேரம் ( டிஆன் = டி / எஃப்) = PWM இன் ON நேரம் அல்லது டிரான்சிஸ்டரின் 'சுவிட்ச் ஆன்' நேரம் கடமை சுழற்சியை அதிர்வெண் மூலம் வகுப்பதன் மூலம் அடையலாம்.
சராசரி வெளியீட்டு மின்னோட்டம் அல்லது சுமை மின்னோட்டம், ( நான்பறவை = Δi / 2 = i சுமை ) = சிற்றலை மின்னோட்டத்தை 2 ஆல் வகுப்பதன் மூலம் இது பெறப்படுகிறது. இந்த மதிப்பு உச்ச மின்னோட்டத்தின் சராசரி மற்றும் பக் மாற்றி வெளியீட்டின் சுமை முழுவதும் கிடைக்கக்கூடிய குறைந்தபட்ச மின்னோட்டமாகும்.
முக்கோண அலை irms இன் RMS மதிப்பு = √ { நான்அல்லது இரண்டு + (Δi) இரண்டு / 12} = இந்த வெளிப்பாடு எங்களுக்கு ஆர்.எம்.எஸ் அல்லது அனைத்து அல்லது ஒரு முக்கோண அலைக் கூறுகளின் மூல சராசரி சதுர மதிப்பை வழங்குகிறது, அவை பக் மாற்றியுடன் தொடர்புடையதாக இருக்கலாம்.
சரி, எனவே மேலே உள்ள பல்வேறு அளவுருக்கள் மற்றும் வெளிப்பாடுகள் ஒரு பக் மாற்றி மூலம் முக்கியமாக சம்பந்தப்பட்டிருந்தன, அவை பக் தூண்டியைக் கணக்கிடும்போது பயன்படுத்தப்படலாம்.
மின்னழுத்தம் மற்றும் மின்னோட்டம் ஒரு பக் தூண்டியுடன் எவ்வாறு தொடர்புபடுத்தப்படலாம் மற்றும் பின்வரும் விளக்கப்பட்ட தரவுகளிலிருந்து இவை எவ்வாறு சரியாக தீர்மானிக்கப்படலாம் என்பதை இப்போது அறியலாம்:
இங்கே நினைவில் கொள்ளுங்கள், டிரான்சிஸ்டரை மாற்றுவது தொடர்ச்சியான பயன்முறையில் இருக்க வேண்டும் என்று நாங்கள் கருதுகிறோம், அதாவது தூண்டல் அதன் சேமிக்கப்பட்ட ஈ.எம்.எஃப் முழுவதையும் வெளியேற்றி காலியாகிவிடும் முன் டிரான்சிஸ்டர் எப்போதும் இயக்கப்படும்.
தூண்டல் திறன் (திருப்பங்களின் எண்ணிக்கை) தொடர்பாக டிரான்சிஸ்டரின் ON நேரம் அல்லது PWM கடமை சுழற்சியை சரியான முறையில் பரிமாணப்படுத்துவதன் மூலம் இது உண்மையில் செய்யப்படுகிறது.
வி மற்றும் நான் உறவு
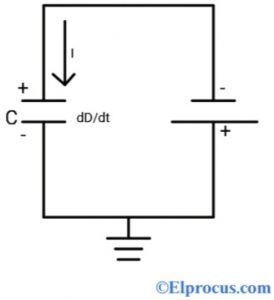
ஒரு பக் தூண்டிக்குள் மின்னழுத்தத்திற்கும் மின்னோட்டத்திற்கும் இடையிலான உறவை பின்வருமாறு வைக்கலாம்:
வி = எல் டி / டிடி
அல்லது
i = 1 / L 0ʃtVdt + iஅல்லது
மேலேயுள்ள சூத்திரம் பக் வெளியீட்டு மின்னோட்டத்தைக் கணக்கிடுவதற்குப் பயன்படுத்தப்படலாம், மேலும் PWM ஒரு அதிவேகமாக உயரும் மற்றும் அழுகும் அலையின் வடிவத்தில் இருக்கும்போது அல்லது முக்கோண அலையாக இருக்கலாம்.
இருப்பினும், PWM செவ்வக அலைவடிவம் அல்லது பருப்பு வகைகளின் வடிவத்தில் இருந்தால், மேலே உள்ள சூத்திரத்தை இவ்வாறு எழுதலாம்:
i = (Vt / L) + iஅல்லது
இங்கே Vt என்பது முறுக்கு முழுவதும் மின்னழுத்தம், அது நீடிக்கும் நேரத்தால் பெருக்கப்படுகிறது (மைக்ரோ விநாடிகளில்)
பக் தூண்டலுக்கான தூண்டல் மதிப்பு L ஐக் கணக்கிடும்போது இந்த சூத்திரம் முக்கியமானது.
PWM முக்கோண அலைகளின் வடிவத்தில் இருக்கும்போது, ஒரு பக் தூண்டியிலிருந்து தற்போதைய வெளியீடு ஒரு நேரியல் வளைவு அல்லது பரந்த முக்கோண அலைகளின் வடிவத்தில் இருப்பதை மேலே உள்ள வெளிப்பாடு வெளிப்படுத்துகிறது.
இப்போது ஒரு பக் தூண்டிக்குள் உச்ச மின்னோட்டத்தை ஒருவர் எவ்வாறு தீர்மானிக்கலாம் என்று பார்ப்போம், இதற்கான சூத்திரம்:
ipk = (வின் - Vtrans - Vout) டன் / L + iஅல்லது
டிரான்சிஸ்டர் இயக்கப்படும் போது மேலேயுள்ள வெளிப்பாடு நமக்கு உச்ச மின்னோட்டத்தை வழங்குகிறது மற்றும் தூண்டியின் உள்ளே உள்ள மின்னோட்டம் நேர்கோட்டுடன் உருவாகிறது (அதன் செறிவு வரம்பிற்குள் *)
உச்ச மின்னோட்டத்தைக் கணக்கிடுகிறது
ஆகவே, டிரான்சிஸ்டர் சுவிட்ச் ஆன் கட்டத்தில் இருக்கும்போது, பக் தூண்டிக்குள் உச்ச மின்னோட்டத்தை உருவாக்குவதற்கு மேற்கண்ட வெளிப்பாடு பயன்படுத்தப்படலாம்.
Io என்ற வெளிப்பாடு LHS க்கு மாற்றப்பட்டால்:
நான்pk- நான்அல்லது= (மது - Vtrans - Vout) டன் / எல்
இங்கே Vtrans என்பது டிரான்சிஸ்டரின் சேகரிப்பாளர் / உமிழ்ப்பான் முழுவதும் மின்னழுத்த வீழ்ச்சியைக் குறிக்கிறது
சிற்றலை மின்னோட்டமும் Δi = ipk - io ஆல் வழங்கப்படுகிறது என்பதை நினைவில் கொள்க, எனவே இதை நாம் பெறும் மேலே உள்ள சூத்திரத்தில் மாற்றுகிறோம்:
Δi = (வின் - Vtrans - Vout) டன் / எல் ------------------------------------- எக் # 1
டிரான்சிஸ்டரின் சுவிட்ச்-ஆஃப் காலகட்டத்தில் தூண்டிக்குள் மின்னோட்டத்தைப் பெறுவதற்கான வெளிப்பாட்டை இப்போது பார்ப்போம், இது பின்வரும் சமன்பாட்டின் உதவியுடன் தீர்மானிக்கப்படலாம்:
நான்அல்லது= நான்pk- (Vout - VD) டோஃப் / எல்
மீண்டும், மேலே உள்ள வெளிப்பாட்டில் ipi - io ஐ Δi க்கு மாற்றுவதன் மூலம்:
Δi = (Vout - VD) Toff / L ------------------------------------- Eq # 2
டிரான்சிஸ்டர் தூண்டலுக்கு மின்னோட்டத்தை வழங்கும்போது, சிற்றலை நடப்பு மதிப்புகளை தீர்மானிக்க Eq # 1 மற்றும் Eq # 2 ஐப் பயன்படுத்தலாம், அது சரியான நேரத்தில் ..... மற்றும் தூண்டல் சேமித்த மின்னோட்டத்தை சுமை வழியாக வடிகட்டும்போது டிரான்சிஸ்டர் சுவிட்ச் ஆஃப் காலங்களில்.
மேலேயுள்ள கலந்துரையாடலில் ஒரு பக் தூண்டியில் தற்போதைய (ஆம்ப்) காரணியை தீர்மானிப்பதற்கான சமன்பாட்டை வெற்றிகரமாகப் பெற்றோம்.
மின்னழுத்தத்தை தீர்மானித்தல்
இப்போது ஒரு பக் தூண்டியில் மின்னழுத்த காரணியை தீர்மானிக்க உதவும் ஒரு வெளிப்பாட்டைக் கண்டுபிடிக்க முயற்சிப்போம்.
Eq # 1 மற்றும் Eq # 2 இரண்டிலும் பொதுவானது என்பதால், நாம் பெற விதிமுறைகளை ஒருவருக்கொருவர் சமன் செய்யலாம்:
(மது - Vtrans - Vout) டன் / எல் = (Vout - VD) டோஃப் / எல்
வின்டன் - Vtrans - Vout = VoutToff - VDToff
வின்டன் - Vtrans - VoutTon = VoutToff - VDToff
VoutTon + VoutToff = VDToff + VinTon - VtransTon
Vout = (VDToff + VinTon - VtransTon) / T.
மேலே உள்ள வெளிப்பாட்டில் டன் / டி வெளிப்பாடுகளை கடமை சுழற்சி டி மூலம் மாற்றினால், நமக்குக் கிடைக்கும்
Vout = (வின் - Vtrans) D + VD (1 - D)
மேற்கண்ட சமன்பாட்டை மேலும் செயலாக்குவது நமக்கு கிடைக்கிறது:
Vout + VD = (வின் - Vtrans + VD) D.
அல்லது
டி = வ out ட் - வி.டி / (வின் - விட்ரான்ஸ் - வி.டி)
இங்கே வி.டி என்பது டையோடு முழுவதும் மின்னழுத்த வீழ்ச்சியைக் குறிக்கிறது.
ஸ்டெப் டவுன் மின்னழுத்தத்தைக் கணக்கிடுகிறது
டிரான்சிஸ்டர் மற்றும் டையோடு முழுவதும் மின்னழுத்த வீழ்ச்சிகளை நாம் புறக்கணித்தால் (உள்ளீட்டு மின்னழுத்தத்துடன் ஒப்பிடும்போது இவை மிகவும் அற்பமானவை என்பதால்), மேலே கொடுக்கப்பட்டுள்ள வெளிப்பாட்டை கீழே கொடுக்கப்பட்டுள்ளபடி குறைக்கலாம்:
வ out ட் = டிவின்
பக் கன்வெர்ட்டர் சர்க்யூட்டை வடிவமைக்கும்போது ஒரு குறிப்பிட்ட தூண்டியிலிருந்து நோக்கம் கொண்ட ஸ்டெப் டவுன் மின்னழுத்தத்தைக் கணக்கிடுவதற்கு மேலே உள்ள இறுதி சமன்பாட்டைப் பயன்படுத்தலாம்.
மேற்கண்ட சமன்பாடு எங்கள் முந்தைய கட்டுரையின் தீர்க்கப்பட்ட எடுத்துக்காட்டில் விவாதிக்கப்பட்டதைப் போன்றது ' பக் மாற்றிகள் எவ்வாறு செயல்படுகின்றன .
அடுத்த கட்டுரையில், ஒரு பக் தூண்டியில் திருப்பங்களின் எண்ணிக்கையை எவ்வாறு மதிப்பிடுவது என்பதைக் கற்றுக்கொள்வோம் .... தயவுசெய்து காத்திருங்கள்.
முந்தைய: பக் மாற்றிகள் எவ்வாறு செயல்படுகின்றன அடுத்து: உயர் வாட்டேஜ் தூரிகை இல்லாத மோட்டார் கட்டுப்பாட்டு சுற்று