இந்த இடுகையில் ஒரு எளிய 3 கட்ட தூண்டல் மோட்டார் வேக கட்டுப்பாட்டு சுற்று ஒன்றை உருவாக்குவது பற்றி நாங்கள் விவாதிக்கிறோம், இது ஒரு கட்ட தூண்டல் மோட்டருக்கும் அல்லது எந்த வகை ஏசி மோட்டருக்கும் பயன்படுத்தப்படலாம்.
அது வரும்போது தூண்டல் மோட்டார்கள் வேகத்தை கட்டுப்படுத்துகிறது , பொதுவாக மேட்ரிக்ஸ் மாற்றிகள் பயன்படுத்தப்படுகின்றன, இதில் எல்.சி வடிப்பான்கள், இரு திசை சுவிட்சுகள் (ஐ.ஜி.பி.டி.களைப் பயன்படுத்துதல்) போன்ற பல சிக்கலான நிலைகள் அடங்கும்.
சிக்கலான மைக்ரோகண்ட்ரோலர் சர்க்யூட்டைப் பயன்படுத்தி கடமை சுழற்சியை சரிசெய்யக்கூடிய, இறுதியாக தேவையான மோட்டார் வேகக் கட்டுப்பாட்டை வழங்கும் ஒரு நறுக்கப்பட்ட ஏசி சிக்னலை அடைவதற்கு இவை அனைத்தும் பயன்படுத்தப்படுகின்றன.
எவ்வாறாயினும், மேம்பட்ட ஜீரோ கிராசிங் டிடெக்டர் ஆப்டோ கப்ளர் ஐ.சிக்கள், ஒரு பவர் ட்ரைக் மற்றும் பி.டபிள்யூ.எம் சர்க்யூட் ஆகியவற்றைப் பயன்படுத்தி மிகவும் எளிமையான கருத்தாக்கத்தின் மூலம் 3-கட்ட தூண்டல் மோட்டார் வேகக் கட்டுப்பாட்டை நாம் பரிசோதிக்கலாம்.
ஜீரோ கிராசிங் டிடெக்டர் ஆப்டோ கப்ளரைப் பயன்படுத்துதல்
முக்கோண கட்டுப்பாட்டு சுற்றுகளை மிகவும் பாதுகாப்பானதாகவும், கட்டமைக்க எளிதானதாகவும் மாற்றியமைத்த MOC தொடர் ஆப்டோகூப்லர்களுக்கு நன்றி, மேலும் நோக்கம் கொண்ட கட்டுப்பாடுகளுக்கு தொந்தரவு இல்லாத PWM ஒருங்கிணைப்பை அனுமதிக்கிறது.
எனது முந்தைய இடுகைகளில் ஒன்றில் நான் ஒரு எளிய விஷயத்தைப் பற்றி விவாதித்தேன் PWM மென்மையான தொடக்க மோட்டார் கட்டுப்பாட்டு சுற்று இது இணைக்கப்பட்ட மோட்டாரில் சிறந்த மென்மையான தொடக்கத்தை வழங்குவதற்காக MOC3063 IC ஐ செயல்படுத்தியது.
இங்கேயும் முன்மொழியப்பட்ட 3 கட்ட தூண்டல் மோட்டார் வேக கட்டுப்பாட்டு சுற்றுவட்டத்தை செயல்படுத்த ஒரே மாதிரியான முறையைப் பயன்படுத்துகிறோம், இது எவ்வாறு செய்யப்படலாம் என்பதை பின்வரும் படம் காட்டுகிறது:
படத்தில், மூன்று நிலையான MOC ஆப்டோ கப்ளர் நிலைகளை அவற்றின் நிலையான முக்கோண சீராக்கி பயன்முறையில் கட்டமைக்கப்பட்டிருப்பதைக் காணலாம், மேலும் உள்ளீட்டு பக்கமும் ஒரு எளிய ஐசி 555 பிடபிள்யூஎம் சுற்று .
3 கட்ட ஏசி உள்ளீட்டைக் கையாளுவதற்கும் இணைக்கப்பட்ட தூண்டல் மோட்டருக்கு வழங்குவதற்கும் 3 எம்ஓசி சுற்றுகள் கட்டமைக்கப்பட்டுள்ளன.
ஒப்டோவின் தனிமைப்படுத்தப்பட்ட எல்.ஈ.டி கட்டுப்பாட்டு பக்கத்தில் உள்ள பி.டபிள்யூ.எம் உள்ளீடு எம்.ஓ.சி ஐ.சி.எஸ் மூலம் செயலாக்கப்படும் 3 கட்ட ஏசி உள்ளீட்டின் நறுக்கும் விகிதத்தை தீர்மானிக்கிறது.
ஐசி 555 பிடபிள்யூஎம் கன்ட்ரோலரைப் பயன்படுத்துதல் (ஜீரோ மின்னழுத்த மாறுதல்)
சரிசெய்வதன் மூலம் இது குறிக்கிறது 555 ஐசியுடன் தொடர்புடைய பிடபிள்யூஎம் பானை தூண்டல் மோட்டரின் வேகத்தை திறம்பட கட்டுப்படுத்த முடியும்.
அதன் முள் # 3 இல் உள்ள வெளியீடு மாறுபட்ட கடமை சுழற்சியைக் கொண்டு வருகிறது, இதன் விளைவாக வெளியீட்டு முக்கோணங்களை மாற்றுகிறது, இதன் விளைவாக ஏசி ஆர்எம்எஸ் மதிப்பை அதிகரிக்கும் அல்லது குறைந்து விடும்.
பரந்த PWM கள் மூலம் RMS ஐ அதிகரிப்பது மோட்டரில் அதிக வேகத்தைப் பெற உதவுகிறது, அதே நேரத்தில் குறுகலான PWM களின் மூலம் AC RMS ஐக் குறைப்பது எதிர் விளைவை உருவாக்குகிறது, அதாவது இது மோட்டார் விகிதாசார வேகத்தை குறைக்கிறது.
ஐ.சி.க்கள் பல உள் அதிநவீன அம்சங்களுடன் ஒதுக்கப்பட்டுள்ளதால், மேலே குறிப்பிடப்பட்ட அம்சங்கள் நிறைய துல்லியத்தோடும் பாதுகாப்போடும் செயல்படுத்தப்படுகின்றன. ஓட்டுநர் முக்கோணங்கள் மற்றும் அதிக தூண்டல் சுமைகள் தூண்டல் மோட்டார்கள், சோலெனாய்டுகள், வால்வுகள், தொடர்புகள், திட நிலை ரிலேக்கள் போன்றவை.
டி.சி நிலைக்கு ஒரு தனிமைப்படுத்தப்பட்ட செயல்பாட்டை ஐசி உறுதிசெய்கிறது, இது மின்சார அதிர்ச்சியின் பயமின்றி மாற்றங்களைச் செய்ய பயனரை அனுமதிக்கிறது.
3 க்கு பதிலாக ஒரு MOC ஐசியைப் பயன்படுத்துவதன் மூலம், ஒற்றை கட்ட மோட்டார் வேகத்தைக் கட்டுப்படுத்தவும் இந்தக் கொள்கையை திறமையாகப் பயன்படுத்தலாம்.
வடிவமைப்பு உண்மையில் அடிப்படையாகக் கொண்டது நேர விகிதாசார முக்கோண இயக்கி கோட்பாடு. மேல் IC555 PWM சுற்று 50% கடமை சுழற்சியை அதிக அதிர்வெண்ணில் உருவாக்க சரிசெய்யப்படலாம், அதே நேரத்தில் குறைந்த PWM சுற்று தொடர்புடைய பானையின் சரிசெய்தல் மூலம் தூண்டல் மோட்டரின் வேக கட்டுப்பாட்டு செயல்பாட்டை செயல்படுத்த பயன்படுத்தப்படலாம்.
இந்த 555 ஐசி மேல் ஐசி 555 சுற்று விட ஒப்பீட்டளவில் குறைந்த அதிர்வெண் கொண்டதாக பரிந்துரைக்கப்படுகிறது. முள் # 6/2 மின்தேக்கியை சுமார் 100nF ஆக அதிகரிப்பதன் மூலம் இதைச் செய்யலாம்.

குறிப்பு: பேஸ் வயர்களுடன் சீரியஸில் பொருத்தமான தொழிலாளர்களைச் சேர்ப்பது, அமைப்பின் வேகமான கட்டுப்பாட்டு செயல்திறனை விரைவாக மேம்படுத்தலாம்.
மேற்கண்ட கருத்தைப் பயன்படுத்தி அனுமானிக்கப்பட்ட அலைவடிவம் மற்றும் கட்டக் கட்டுப்பாடு:

3-கட்ட தூண்டல் மோட்டாரைக் கட்டுப்படுத்தும் மேலே விளக்கப்பட்ட முறை உண்மையில் அது மிகவும் கச்சா V / Hz கட்டுப்பாடு இல்லை .
மோட்டருக்கு சராசரி சக்தியை உற்பத்தி செய்வதற்கும், இந்த சராசரி ஏ.சி.யை மோட்டருக்கு மாற்றுவதன் மூலம் வேகத்தைக் கட்டுப்படுத்துவதற்கும் வெவ்வேறு விகிதங்களில் மெயின்களை ஆன் / ஆஃப் செய்வதை இது பயன்படுத்துகிறது.
நீங்கள் மோட்டாரை ஆன் / ஆஃப் கைமுறையாக 40 முறை அல்லது நிமிடத்திற்கு 50 முறை மாற்றினால் கற்பனை செய்து பாருங்கள். இது உங்கள் மோட்டார் சில சராசரி மதிப்புக்கு குறைந்துவிடும், ஆனால் தொடர்ந்து நகரும். மேற்கண்ட கொள்கை அதே வழியில் செயல்படுகிறது.
V / Hz விகிதத்தின் சரியான கட்டுப்பாட்டை உறுதிசெய்து, சீட்டின் வேகம் அல்லது எந்த மின்னழுத்த ஏற்ற இறக்கங்களையும் பொறுத்து தானாகவே அதை சரிசெய்யும் ஒரு சுற்று வடிவமைப்பதே ஒரு தொழில்நுட்ப அணுகுமுறை.
இதற்காக நாங்கள் அடிப்படையில் பின்வரும் கட்டங்களைப் பயன்படுத்துகிறோம்:
- எச்-பிரிட்ஜ் அல்லது ஃபுல் பிரிட்ஜ் ஐஜிபிடி டிரைவர் சர்க்யூட்
- முழு பாலம் சுற்றுக்கு உணவளிக்க 3-கட்ட ஜெனரேட்டர் நிலை
- V / Hz PWM செயலி
முழு பாலம் ஐஜிபிடி கட்டுப்பாட்டு சுற்று பயன்படுத்துதல்
மேலே உள்ள முக்கோண அடிப்படையிலான வடிவமைப்பின் நடைமுறைகளை அமைப்பது உங்களுக்கு அச்சுறுத்தலாகத் தெரிந்தால், பின்வரும் முழு-பாலம் PWM அடிப்படையிலான தூண்டல் மோட்டார் வேகக் கட்டுப்பாட்டை முயற்சிக்கலாம்:

மேலே உள்ள படத்தில் காட்டப்பட்டுள்ள சுற்று ஒரு சிப் முழு-பாலம் இயக்கியைப் பயன்படுத்துகிறது ஐசி ஐஆர்எஸ் 2330 (சமீபத்திய பதிப்பு 6EDL04I06NT) இது பாதுகாப்பான மற்றும் சரியான 3 கட்ட மோட்டார் செயல்பாட்டை பூர்த்தி செய்வதற்காக உள்ளமைக்கப்பட்ட அனைத்து அம்சங்களையும் கொண்டுள்ளது.
தேவையான 3 கட்ட ஊசலாடும் வெளியீட்டை உருவாக்குவதற்கு ஐசிக்கு அதன் HIN / LIN பின்அவுட்களில் ஒத்திசைக்கப்பட்ட 3 கட்ட தர்க்க உள்ளீடு மட்டுமே தேவைப்படுகிறது, இது இறுதியாக முழு பாலம் ஐஜிபிடி நெட்வொர்க் மற்றும் இணைக்கப்பட்ட 3 கட்ட மோட்டாரை இயக்க பயன்படுகிறது.
தி வேகக் கட்டுப்பாடு PWM ஊசி எங்கள் முந்தைய வடிவமைப்புகளில் காணப்படுவது போல 3 தனி அரை பாலம் NPN / PNP இயக்கிகள் நிலைகள் வழியாக செயல்படுத்தப்படுகிறது, இது IC 555 PWM ஜெனரேட்டரிலிருந்து SPWM ஊட்டத்துடன் கட்டுப்படுத்தப்படுகிறது. இந்த PWM நிலை இறுதியில் தூண்டல் மோட்டரின் வேகத்தைக் கட்டுப்படுத்தப் பயன்படுத்தப்படலாம்.
தூண்டல் மோட்டருக்கான உண்மையான வேகக் கட்டுப்பாட்டு முறையைக் கற்றுக்கொள்வதற்கு முன், தானியங்கி எவ்வாறு என்பதை முதலில் புரிந்துகொள்வோம் வி / ஹெர்ட்ஸ் கட்டுப்பாடு கீழே விவாதிக்கப்பட்டபடி, சில ஐசி 555 சுற்றுகளைப் பயன்படுத்தி அடையலாம்
தானியங்கி V / Hz PWM செயலி சுற்று (மூடிய சுழற்சி)
மேலேயுள்ள பிரிவுகளில், உற்பத்தியாளரால் குறிப்பிடப்பட்ட விகிதத்தில் தூண்டல் மோட்டாரை நகர்த்த உதவும் வடிவமைப்புகளை நாங்கள் கற்றுக்கொண்டோம், ஆனால் பின்வரும் PWM செயலி H உடன் ஒருங்கிணைக்கப்படாவிட்டால் அது நிலையான V / Hz விகிதத்திற்கு ஏற்ப சரிசெய்யப்படாது. -பிரிட்ஜ் பிடபிள்யூஎம் உள்ளீட்டு ஊட்டம்.

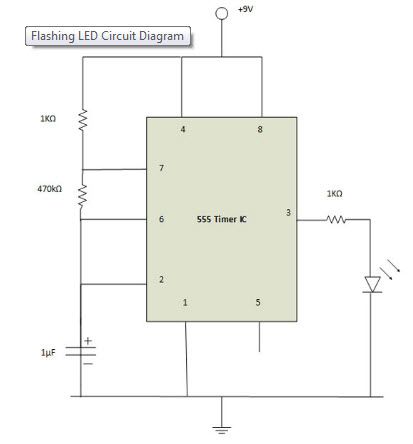
மேலே உள்ள சுற்று ஒரு எளிமையானது ஐசி 555 ஜோடியைப் பயன்படுத்தி பிடபிள்யூஎம் ஜெனரேட்டர் . IC1 PWM அதிர்வெண்ணை உருவாக்குகிறது, இது R4 / C3 உதவியுடன் IC2 இன் முள் # 6 இல் முக்கோண அலைகளாக மாற்றப்படுகிறது.
இந்த முக்கோண அலைகள் ஐசி 2 இன் முள் # 5 இல் உள்ள சைன்வேவ் சிற்றலுடன் ஒப்பிடப்படுகின்றன. இந்த மாதிரி சிற்றலைகள் 3 கட்ட ஏசி மெயின்களை 12 வி ஏசி சிற்றலைகளாக சரிசெய்வதன் மூலம் பெறப்படுகின்றன, மேலும் தேவையான செயலாக்கத்திற்காக ஐசி 2 இன் # 5 ஐ பின்னிணைக்க வழங்கப்படுகிறது.
இரண்டு அலைவடிவத்தையும் ஒப்பிடுவதன் மூலம், சரியான பரிமாணம் SPWM உருவாக்கப்படுகிறது ஐசி 2 இன் முள் # 3 இல், இது எச்-பிரிட்ஜ் நெட்வொர்க்கிற்கான ஓட்டுநர் பிடபிள்யூஎம் ஆகிறது.
வி / ஹெர்ட்ஸ் சுற்று எவ்வாறு இயங்குகிறது
முள் # 5 இல் மின்தேக்கியில் மின்சாரம் மாறும்போது, முள் # 5 இல் பூஜ்ஜிய மின்னழுத்தத்தை வழங்குவதன் மூலம் தொடங்குகிறது, இது மிகக் குறைந்த SPWM மதிப்பை ஏற்படுத்துகிறது எச்-பிரிட்ஜ் சுற்று , இது தூண்டல் மோட்டாரை மெதுவான படிப்படியான மென்மையான தொடக்கத்துடன் தொடங்க உதவுகிறது.
இந்த மின்தேக்கி கட்டணம் வசூலிக்கும்போது, முள் # 5 இல் உள்ள திறன் உயர்கிறது, இது SPWM ஐ விகிதாசாரமாக உயர்த்துகிறது மற்றும் படிப்படியாக வேகத்தை பெற மோட்டருக்கு உதவுகிறது.
ஐசி 2 இன் முள் # 5 உடன் ஒருங்கிணைக்கப்பட்ட ஒரு டேகோமீட்டர் பின்னூட்ட சுற்றையும் நாம் காணலாம்.
இது tachometer ரோட்டார் வேகம் அல்லது சீட்டு வேகத்தை கண்காணிக்கிறது மற்றும் ஐசி 2 இன் முள் # 5 இல் கூடுதல் மின்னழுத்தத்தை உருவாக்குகிறது.
இப்போது மோட்டார் வேகம் அதிகரிக்கும் போது ஸ்லிப் வேகம் ஸ்டேட்டர் அதிர்வெண்ணுடன் ஒத்திசைக்க முயற்சிக்கிறது மற்றும் செயல்பாட்டில் அது வேகத்தைப் பெறத் தொடங்குகிறது.
தூண்டல் சீட்டில் இந்த அதிகரிப்பு டகோமீட்டர் மின்னழுத்தத்தை விகிதாசாரமாக அதிகரிக்கிறது, இதன் விளைவாக ஐசி 2 அதிகரிக்கிறது SPWM வெளியீடு இது மோட்டார் வேகத்தை மேலும் அதிகரிக்கிறது.
மேலே உள்ள சரிசெய்தல் V / Hz விகிதத்தை மிகவும் நிலையான நிலைக்கு பராமரிக்க முயற்சிக்கிறது, இறுதியாக IC2 இலிருந்து SPWM மேலும் அதிகரிக்க முடியாது.
இந்த கட்டத்தில் ஸ்லிப் வேகம் மற்றும் ஸ்டேட்டர் வேகம் ஒரு நிலையான நிலையைப் பெறுகிறது மற்றும் உள்ளீட்டு மின்னழுத்தம் அல்லது சீட்டு வேகம் (சுமை காரணமாக) மாற்றப்படாத வரை இது பராமரிக்கப்படுகிறது. இவை மாற்றப்பட்டால் V / Hz செயலி சுற்று மீண்டும் செயல்பாட்டுக்கு வந்து தூண்டல் மோட்டார் வேகத்தின் உகந்த பதிலைப் பராமரிப்பதற்கான விகிதத்தை சரிசெய்யத் தொடங்குகிறது.
டகோமீட்டர்
தி டகோமீட்டர் சுற்று பின்வரும் எளிய சுற்று பயன்படுத்தி மலிவாக கட்டப்படலாம் மற்றும் மேலே விளக்கப்பட்ட சுற்று நிலைகளுடன் ஒருங்கிணைக்கப்படலாம்:

வேகக் கட்டுப்பாட்டை எவ்வாறு செயல்படுத்துவது
மேலே உள்ள பத்திகளில், ஒரு ஒருங்கிணைப்பதன் மூலம் அடையக்கூடிய தானியங்கி ஒழுங்குமுறை செயல்முறையை நாங்கள் புரிந்துகொண்டோம் tachometer கருத்து SPWM கட்டுப்பாட்டு சுற்றுக்கு தானாக ஒழுங்குபடுத்தும்.
இப்போது ஒரு தூண்டல் மோட்டரின் வேகத்தை அதிர்வெண் மாறுபடுவதன் மூலம் எவ்வாறு கட்டுப்படுத்த முடியும் என்பதைக் கற்றுக்கொள்வோம், இது இறுதியில் SPWM ஐ சரியான V / Hz விகிதத்தை கைவிட்டு பராமரிக்க கட்டாயப்படுத்தும்.
பின்வரும் வரைபடம் வேகக் கட்டுப்பாட்டு நிலையை விளக்குகிறது:

ஐசி 4035 ஐப் பயன்படுத்தி 3-கட்ட ஜெனரேட்டர் சுற்று ஒன்றை இங்கே காணலாம், அதன் கட்ட மாற்ற மாற்ற அதிர்வெண் அதன் முள் # 6 இல் கடிகார உள்ளீட்டை மாற்றுவதன் மூலம் மாறுபடும்.
3 கட்ட சமிக்ஞைகள் 4049 ஐசி வாயில்களில் தேவையான HIN ஐ உற்பத்தி செய்ய பயன்படுத்தப்படுகின்றன, முழு-பிரிட்ஜ் இயக்கி நெட்வொர்க்கிற்கான LIN ஊட்டங்கள்.
ஐசி 4035 இன் கடிகார அதிர்வெண்ணைப் பொருத்தமாக மாற்றுவதன் மூலம், தூண்டல் மோட்டரின் இயக்க 3-கட்ட அதிர்வெண்ணை திறம்பட மாற்ற முடியும் என்பதை இது குறிக்கிறது.
இது ஒரு எளிய ஐசி 555 அஸ்டபிள் சர்க்யூட் மூலம் செயல்படுத்தப்படுகிறது, இது ஐசி 4035 இன் முள் # 6 இல் சரிசெய்யக்கூடிய அதிர்வெண்ணுக்கு உணவளிக்கிறது, மேலும் இணைக்கப்பட்ட 100 கே பானை மூலம் அதிர்வெண்ணை சரிசெய்ய அனுமதிக்கிறது. மின்தேக்கி சி கணக்கிடப்பட வேண்டும், அதாவது சரிசெய்யக்கூடிய அதிர்வெண் வரம்பு இணைக்கப்பட்ட தூண்டல் மோட்டரின் சரியான விவரக்குறிப்பிற்குள் வருகிறது.
அதிர்வெண் பானை மாறுபடும் போது, தூண்டல் மோட்டரின் பயனுள்ள அதிர்வெண்ணும் மாறுகிறது, இது அதற்கேற்ப மோட்டரின் வேகத்தை மாற்றுகிறது.
எடுத்துக்காட்டாக, அதிர்வெண் குறைக்கப்படும்போது, மோட்டார் வேகத்தைக் குறைக்க காரணமாகிறது, இதன் விளைவாக டகோமீட்டர் வெளியீடு மின்னழுத்தத்தை விகிதாசாரமாகக் குறைக்கிறது.
டேகோமீட்டர் வெளியீட்டில் இந்த விகிதாசாரக் குறைப்பு SPWM ஐக் குறைக்க கட்டாயப்படுத்துகிறது, இதன் மூலம் மின்னழுத்த வெளியீட்டை மோட்டருக்கு விகிதாசாரமாக இழுக்கிறது.
இந்த நடவடிக்கை அதிர்வெண் கட்டுப்பாடு மூலம் தூண்டல் மோட்டார் வேகத்தை கட்டுப்படுத்தும் போது V / Hz விகிதம் பராமரிக்கப்படுவதை உறுதி செய்கிறது.
எச்சரிக்கை: மேற்கண்ட கருத்து கோட்பாட்டு அனுமானங்களில் மட்டுமே வடிவமைக்கப்பட்டுள்ளது, தயவுசெய்து எச்சரிக்கையுடன் தொடரவும்.
இந்த 3-கட்ட தூண்டல் மோட்டார் வேக கட்டுப்பாட்டு வடிவமைப்பு குறித்து உங்களுக்கு மேலும் ஏதேனும் சந்தேகம் இருந்தால், அதை உங்கள் கருத்துகள் மூலம் இடுகையிட உங்களை மிகவும் வரவேற்கிறோம்.
முந்தைய: ஒரு தடையில்லா மின்சாரம் (யுபிஎஸ்) சுற்று வடிவமைப்பது எப்படி அடுத்து: ஐசி 555 உடன் இரண்டு மாற்று சுமைகளை ஆன் / ஆஃப் செய்தல்